- 基本系統特性
- DSP - 靜態系統
- DSP - 動態系統
- DSP - 因果系統
- DSP - 非因果系統
- DSP - 反因果系統
- DSP - 線性系統
- DSP - 非線性系統
- DSP - 時不變系統
- DSP - 時變系統
- DSP - 穩定系統
- DSP - 不穩定系統
- DSP - 例題解析
- 快速傅立葉變換
- DSP - 快速傅立葉變換
- DSP - 原地計算
- DSP - 計算機輔助設計
- 數字訊號處理資源
- DSP - 快速指南
- DSP - 有用資源
- DSP - 討論
數字訊號處理 - 快速指南
數字訊號處理 - 訊號定義
定義
任何攜帶資訊的物理量都可以稱為訊號。它也可以定義為隨時間、溫度、壓力或任何獨立變數(如語音訊號或影片訊號)而變化的物理量。
訊號的特性(幅度、形狀、相位、頻率等)發生變化的過程稱為訊號處理。
注意 - 任何干擾主訊號的不需要的訊號都稱為噪聲。所以,噪聲也是訊號,但它是無用的訊號。
根據它們的表示和處理方式,訊號可以分為不同的類別,其細節將在下面討論。
連續時間訊號
連續時間訊號定義在時間的連續範圍內,因此由連續的獨立變量表示。連續時間訊號通常被稱為模擬訊號。
這種型別的訊號在幅度和時間上都表現出連續性。它們在每一個時刻都有值。正弦和餘弦函式是連續時間訊號的最佳例子。
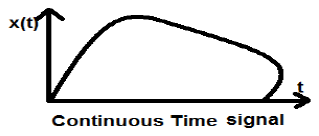
上面所示的訊號是連續時間訊號的一個例子,因為我們可以在每一個時刻得到訊號的值。
離散時間訊號
在離散時間點定義的訊號稱為離散訊號。因此,每一個獨立變數都有不同的值。因此,它們表示為數字序列。
雖然語音和影片訊號可以以連續和離散時間格式表示,但在某些情況下,它們是相同的。幅度也顯示出離散特性。數字訊號是最好的例子,它的幅度和時間都是離散的。
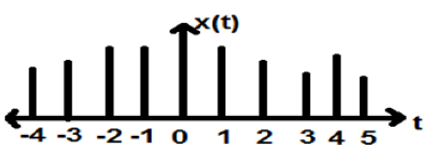
上圖描述了離散訊號在一段時間內的離散幅度特性。數學上,這些型別的訊號可以表示為:
$$x = \left \{ x\left [ n \right ] \right \},\quad -\infty < n< \infty$$其中,n 是整數。
這是一個數字序列 x,其中序列中的第 n 個數字表示為 x[n]。
數字訊號處理 - 基本連續時間訊號
為了測試系統,通常使用標準或基本訊號。這些訊號是許多複雜訊號的基本組成部分。因此,它們在訊號和系統的研究中起著非常重要的作用。
單位衝激訊號或狄拉克函式
滿足條件 $\delta(t) = \lim_{\epsilon \to \infty} x(t)$ 的訊號稱為單位衝激訊號。當 t = 0 時,該訊號趨於無窮大;當 t ≠ 0 時,該訊號趨於零,其曲線下的面積始終等於 1。除了 t = 0,狄拉克函式在其他任何地方的幅度都為零。
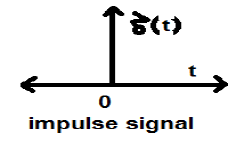
單位衝激訊號的特性
- δ(t) 是偶訊號。
- δ(t) 是既不是能量訊號也不是功率訊號 (NENP) 的例子。
- 單位衝激訊號的面積可以寫成: $$A = \int_{-\infty}^{\infty} \delta (t)dt = \int_{-\infty}^{\infty} \lim_{\epsilon \to 0} x(t) dt = \lim_{\epsilon \to 0} \int_{-\infty}^{\infty} [x(t)dt] = 1$$
- 訊號的權重或強度可以寫成: $$y(t) = A\delta (t)$$
- 加權衝激訊號的面積可以寫成: $$y (t) = \int_{-\infty}^{\infty} y (t)dt = \int_{-\infty}^{\infty} A\delta (t) = A[\int_{-\infty}^{\infty} \delta (t)dt ] = A = 1$$
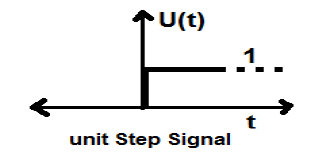
單位階躍訊號
滿足以下兩個條件的訊號:
- $U(t) = 1(當\quad t \geq 0 )$ 和
- $U(t) = 0 (當\quad t < 0 ) $
稱為單位階躍訊號。
它具有在 t = 0 處顯示不連續性的特性。在不連續點,訊號值由訊號值之前和之後的平均值給出(根據吉布斯現象)。
如果我們將一個階躍訊號新增到另一個時間尺度變換的階躍訊號,則結果將為 1。它是一個功率型訊號,功率值為 0.5。均方根 (RMS) 值為 0.707,平均值也為 0.5。
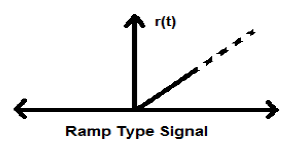
斜坡訊號
階躍訊號的積分結果是斜坡訊號。它用 r(t) 表示。斜坡訊號也滿足條件 $r(t) = \int_{-\infty}^{t} U(t)dt = tU(t)$。它既不是能量訊號也不是功率訊號 (NENP)。
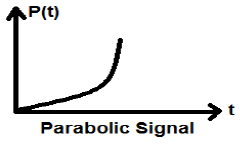
拋物線訊號
斜坡訊號的積分導致拋物線訊號。它用 p(t) 表示。拋物線訊號也滿足條件 $p(t) = \int_{-\infty}^{t} r(t)dt = (t^{2}/2)U(t)$。它既不是能量訊號也不是功率訊號 (NENP)。
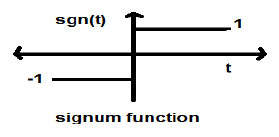
符號函式
此函式表示為
$$sgn(t) = \begin{cases}1 & 當\quad t >0\\-1 & 當\quad t<0\end{cases}$$它是一個功率型訊號。它的功率值和均方根 (RMS) 值都為 1。符號函式的平均值為零。
Sinc 函式
它也是正弦函式,寫成:
$$SinC(t) = \frac{Sin\Pi t}{\Pi T} = Sa(\Pi t)$$Sinc 函式的特性
它是一個能量型訊號。
$Sinc(0) = \lim_{t \to 0}\frac{\sin \Pi t}{\Pi t} = 1$
$Sinc(\infty) = \lim_{t \to \infty}\frac{\sin \Pi \infty}{\Pi \infty} = 0$(sinπ∞ 的範圍在 -1 到 +1 之間變化,但任何數除以無窮大都等於零)
-
如果 $ \sin c(t) = 0 => \sin \Pi t = 0$
$\Rightarrow \Pi t = n\Pi$
$\Rightarrow t = n (n \neq 0)$
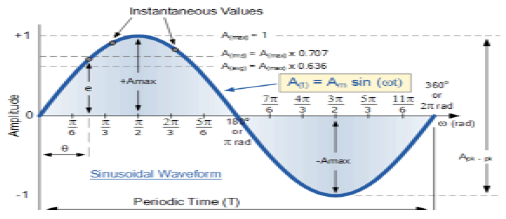
正弦訊號
連續的訊號稱為連續訊號。正弦訊號的一般形式是
$$x(t) = A\sin (\omega t + \phi )$$這裡,
A = 訊號的幅度
ω = 訊號的角頻率(以弧度為單位測量)
φ = 訊號的相位角(以弧度為單位測量)
該訊號傾向於在一定時間後重復自身,因此稱為週期訊號。訊號的週期為:
$$T = \frac{2\pi }{\omega }$$正弦訊號的示意圖如下所示。
矩形函式
如果訊號滿足以下條件,則該訊號被稱為矩形函式:
$$\pi(\frac{t}{\tau}) = \begin{cases}1, & 當\quad t\leq \frac{\tau}{2}\\0, & 其他情況\end{cases}$$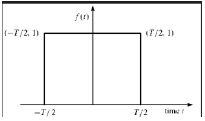
由於關於 Y 軸對稱,因此該訊號被稱為偶訊號。
三角脈衝訊號
滿足以下條件的任何訊號都稱為三角訊號。
$$\Delta(\frac{t}{\tau}) = \begin{cases}1-(\frac{2|t|}{\tau}) & 當|t|<\frac{\tau}{2}\\0 & 當|t|>\frac{\tau}{2}\end{cases}$$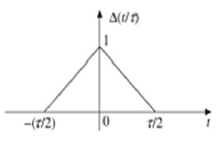
該訊號關於 Y 軸對稱。因此,它也稱為偶訊號。
數字訊號處理 - 基本離散時間訊號
我們已經看到了如何在連續時間域中表示基本訊號。讓我們看看如何在離散時間域中表示基本訊號。
單位脈衝序列
在離散時間域中表示為 δ(n),定義為:
$$\delta(n)=\begin{cases}1, & 當 \quad n=0\\0, & 其他情況\end{cases}$$
單位階躍訊號
離散時間單位階躍訊號定義為:
$$U(n)=\begin{cases}1, & 當 \quad n\geq0\\0, & 當 \quad n<0\end{cases}$$
上圖顯示了離散階躍函式的圖形表示。
單位斜坡函式
離散單位斜坡函式可以定義為:
$$r(n)=\begin{cases}n, & 當 \quad n\geq0\\0, & 當 \quad n<0\end{cases}$$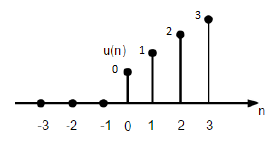
上圖顯示了離散斜坡訊號的圖形表示。
拋物線函式
離散單位拋物線函式表示為 p(n),定義為:
$$p(n) = \begin{cases}\frac{n^{2}}{2} ,& 當 \quad n\geq0\\0, & 當 \quad n<0\end{cases}$$用單位階躍函式表示可以寫成:
$$P(n) = \frac{n^{2}}{2}U(n)$$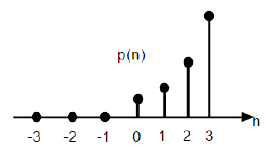
上圖顯示了拋物線序列的圖形表示。
正弦訊號
所有連續時間訊號都是週期性的。離散時間正弦序列可能是週期性的,也可能不是週期性的。這取決於ω的值。對於離散時間訊號,要使其成為週期性的,角頻率ω必須是2π的有理數倍。
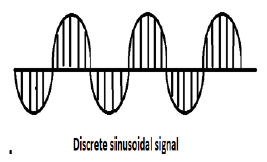
上圖顯示了一個離散正弦訊號。
正弦訊號的離散形式可以表示為:
$$x(n) = A\sin(\omega n + \phi)$$這裡A、ω和φ具有其通常的含義,n是整數。離散正弦訊號的週期由下式給出:
$$N =\frac{2\pi m}{\omega}$$其中,N和m是整數。
DSP - 連續時間訊號分類
連續時間訊號可以根據對訊號執行的不同條件或運算進行分類。
偶訊號和奇訊號
偶訊號
如果訊號滿足以下條件,則稱其為偶訊號:
$$x(-t) = x(t)$$這裡的訊號時間反轉並不意味著幅度有任何變化。例如,考慮下面所示的三角波。
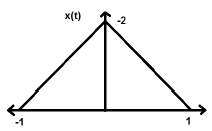
三角訊號是偶訊號,因為它關於Y軸對稱。可以說它是關於Y軸的映象。
考慮下圖所示的另一個訊號。
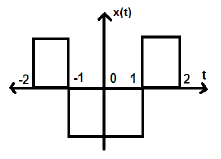
我們可以看到,上述訊號是偶訊號,因為它關於Y軸對稱。
奇訊號
如果訊號滿足以下條件,則稱其為奇訊號:
$$x(-t) = -x(t)$$這裡,時間反轉和幅度變化同時發生。
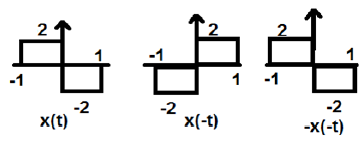
在上圖中,我們可以看到一個階躍訊號x(t)。為了檢驗它是否是奇訊號,首先我們進行時間反轉,即x(-t),結果如下圖所示。然後我們反轉所得訊號的幅度,即–x(-t),結果如下圖所示。
如果我們比較第一個和第三個波形,我們可以看到它們是相同的,即x(t)= -x(-t),這滿足我們的標準。因此,上述訊號是奇訊號。
一些與偶訊號和奇訊號相關的重要的結果如下所示。
- 偶 × 偶 = 偶
- 奇 × 奇 = 偶
- 偶 × 奇 = 奇
- 偶 ± 偶 = 偶
- 奇 ± 奇 = 奇
- 偶 ± 奇 = 既不是偶也不是奇
任何訊號的偶數或奇數形式表示
有些訊號不能直接分類為偶數或奇數型別。它們表示為偶訊號和奇訊號的組合。
$$x(t)\rightarrow x_{e}(t)+x_{0}(t)$$其中xe(t)表示偶訊號,xo(t)表示奇訊號
$$x_{e}(t)=\frac{[x(t)+x(-t)]}{2}$$和
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$例子
求訊號$x(n) = t+t^{2}+t^{3}$的偶部和奇部。
解 − 透過反轉x(n),我們得到
$$x(-n) = -t+t^{2}-t^{3}$$
現在,根據公式,偶部
$$x_{e}(t) = \frac{x(t)+x(-t)}{2}$$
$$= \frac{[(t+t^{2}+t^{3})+(-t+t^{2}-t^{3})]}{2}$$
$$= t^{2}$$
類似地,根據公式,奇部是
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$
$$= \frac{[(t+t^{2}+t^{3})-(-t+t^{2}-t^{3})]}{2}$$
$$= t+t^{3}$$
週期訊號和非週期訊號
週期訊號
週期訊號在一定時間間隔後重復自身。我們可以用方程式表示為:
$$x(t) = x(t)\pm nT$$其中,n = 整數 (1,2,3……)
T = 基波週期 (FTP) ≠ 0 且 ≠∞
基波週期 (FTP) 是訊號週期性的最小正值和固定值。
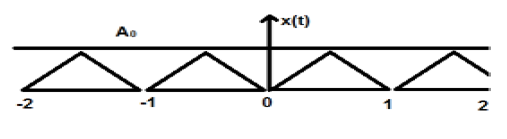
上圖顯示了一個幅度為A的三角訊號。這裡,訊號每1秒重複一次。因此,我們可以說該訊號是週期性的,其FTP為1秒。
非週期訊號
簡單地說,我們可以說,不是週期性的訊號是非週期性的。很明顯,這些訊號不會在任何時間間隔後重復自身。
非週期訊號不遵循一定的格式;因此,沒有特定的數學方程可以描述它們。
能量訊號和功率訊號
當且僅當所包含的總能量是有限且非零的 (0<E<∞) 時,訊號被稱為能量訊號。因此,對於任何能量型訊號,總歸一化訊號都是有限且非零的。
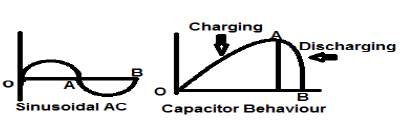
正弦交流電流訊號是能量型訊號的一個完美例子,因為它在一種情況下是正半週期,而在下一半週期是負的。因此,它的平均功率變為零。
無損電容器也是能量型訊號的一個完美例子,因為它連線到電源時會充電到最佳水平,當電源移除時,它會透過負載耗散等量的能量,使其平均功率變為零。
對於任何有限訊號x(t),能量可以用E表示,寫為:
$$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$能量型訊號的頻譜密度給出了分佈在各個頻率水平上的能量量。
功率型訊號
當且僅當歸一化平均功率是有限且非零的 (0<p<∞) 時,訊號被稱為功率型訊號。對於功率型訊號,歸一化平均功率是有限且非零的。幾乎所有周期訊號都是功率訊號,其平均功率是有限且非零的。
在數學形式中,訊號x(t)的功率可以寫成:
$$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$能量訊號和功率訊號的區別
下表總結了能量訊號和功率訊號的區別。
| 功率訊號 | 能量訊號 |
|---|---|
| 實際的週期訊號是功率訊號。 | 非週期訊號是能量訊號。 |
| 這裡,歸一化平均功率是有限且非零的。 | 這裡,總歸一化能量是有限且非零的。 |
|
數學上, $$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$ |
數學上, $$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$ |
| 這些訊號的存在時間是無限的。 | 這些訊號存在於有限的時間段內。 |
| 功率訊號的能量在無限時間內是無限的。 | 能量訊號的功率在無限時間內為零。 |
例題
例1 − 求訊號$z(t) = 2\cos(3\Pi t+30^{o})+4\sin(3\Pi +30^{o})$的功率。
解 − 上述兩個訊號彼此正交,因為它們的頻率項彼此相同,並且它們具有相同的相位差。因此,總功率將是各個功率的總和。
設$z(t) = x(t)+y(t)$
其中$x(t) = 2\cos (3\Pi t+30^{o})$和$y(t) = 4\sin(3\Pi +30^{o})$
x(t)的功率 = $\frac{2^{2}}{2} = 2$
y(t)的功率 = $\frac{4^{2}}{2} = 8$
因此,$P(z) = p(x)+p(y) = 2+8 = 10$…答。
例2 − 測試給定的訊號$x(t) = t^{2}+j\sin t$是否為共軛訊號?
解 − 這裡,實部t2是偶數,虛部(虛數) $\sin t$是奇數。所以上述訊號是共軛訊號。
例3 − 驗證$X(t)= \sin \omega t$是奇訊號還是偶訊號。
解 − 給定$X(t) = \sin \omega t$
透過時間反轉,我們將得到$\sin (-\omega t)$
但我們知道$\sin(-\phi) = -\sin \phi$。
所以,
$$ \sin (-\omega t) = -\sin \omega t$$這滿足訊號為奇訊號的條件。因此,$\sin \omega t$是奇訊號。
DSP - 離散時間訊號分類
與連續時間訊號一樣,離散時間訊號可以根據訊號的條件或運算進行分類。
偶訊號和奇訊號
偶訊號
如果訊號滿足以下條件,則稱其為偶訊號或對稱訊號:
$$x(-n) = x(n)$$
在這裡,我們可以看到x(-1) = x(1),x(-2) = x(2)和x(-n) = x(n)。因此,它是一個偶訊號。
奇訊號
如果訊號滿足以下條件,則稱其為奇訊號:
$$x(-n) = -x(n)$$
從圖中可以看出,x(1) = -x(-1),x(2) = -x(2)和x(n) = -x(-n)。因此,它是一個奇訊號,也是一個反對稱訊號。
週期訊號和非週期訊號
離散時間訊號是週期性的,當且僅當它滿足以下條件:
$$x(n+N) = x(n)$$這裡,x(n)訊號在N週期後重復自身。這可以透過考慮餘弦訊號來最好地理解:
$$x(n) = A \cos(2\pi f_{0}n+\theta)$$ $$x(n+N) = A\cos(2\pi f_{0}(n+N)+\theta) = A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$ $$= A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$為了使訊號成為週期性的,應滿足以下條件:
$$x(n+N) = x(n)$$ $$\Rightarrow A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta) = A \cos(2\pi f_{0}n+\theta)$$即$2\pi f_{0}N$是$2\pi$的整數倍
$$2\pi f_{0}N = 2\pi K$$ $$\Rightarrow N = \frac{K}{f_{0}}$$離散正弦訊號的頻率被$2\pi$的整數倍隔開。
能量訊號和功率訊號
能量訊號
離散時間訊號的能量用E表示。數學上,可以寫成:
$$E = \displaystyle \sum\limits_{n=-\infty}^{+\infty}|x(n)|^2$$如果將$x(n)$的每個單獨值平方並相加,我們得到能量訊號。這裡$x(n)$是能量訊號,其能量在時間上是有限的,即$0< E< \infty$
功率訊號
離散訊號的平均功率表示為P。數學上,這可以寫成:
$$P = \lim_{N \to \infty} \frac{1}{2N+1}\displaystyle\sum\limits_{n=-N}^{+N} |x(n)|^2$$這裡,功率是有限的,即0<P<∞。但是,有些訊號既不屬於能量訊號也不屬於功率訊號。
DSP - 其他訊號
還有一些訊號是透過對它們進行運算而產生的。下面討論一些常見的訊號型別。
共軛訊號
滿足條件$x(t) = x*(-t)$的訊號稱為共軛訊號。
設$x(t) = a(t)+jb(t)$...式1
所以,$x(-t) = a(-t)+jb(-t)$
和$x*(-t) = a(-t)-jb(-t)$...式2
根據條件,$x(t) = x*(-t)$
如果我們比較這兩個推匯出的公式1和2,我們可以看到實部是偶數,而虛部是奇數。這是訊號成為共軛型別的條件。
共軛反對稱訊號
滿足條件$x(t) = -x*(-t)$的訊號稱為共軛反對稱訊號。
設$x(t) = a(t)+jb(t)$...式1
所以$x(-t) = a(-t)+jb(-t)$
和$x*(-t) = a(-t)-jb(-t)$
$-x*(-t) = -a(-t)+jb(-t)$...式2
根據條件$x(t) = -x*(-t)$
現在,再次比較這兩個公式,就像我們對共軛訊號所做的那樣。在這裡,我們會發現實部是奇數,虛部是偶數。這是訊號成為共軛反對稱型別的條件。
例子
設給定的訊號為$x(t) = \sin t+jt^{2}$。
這裡,實部$\sin t$是奇數,虛部$t^2$是偶數。所以,這個訊號可以歸類為共軛反對稱訊號。
任何函式都可以分為兩部分。一部分是共軛對稱的,另一部分是共軛反對稱的。所以任何訊號x(t)都可以寫成
$$x(t) = xcs(t)+xcas(t)$$其中$xcs(t)$是共軛對稱訊號,$xcas(t)$是共軛反對稱訊號
$$xcs(t) = \frac{[x(t)+x*(-t)]}{2}$$和
$$xcas(t) = \frac{[x(t)-x*(-t)]}{2}$$半波對稱訊號
當訊號滿足條件$cx(t) = -x(t\pm (\frac{T_{0}}{2}))$時,稱為半波對稱訊號。這裡,訊號發生幅度反轉和時間位移,位移量為半個週期。對於半波對稱訊號,平均值為零,但反過來則不然。
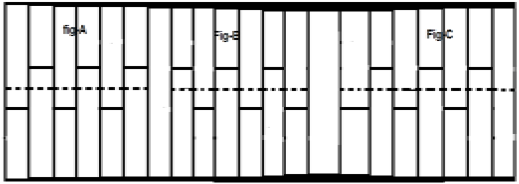
考慮上圖A所示的訊號x(t)。第一步是將訊號進行時間位移,得到$x[t-(\frac{T}{2})]$。因此,新的訊號如B圖所示。接下來,反轉訊號的幅度,即使其變為$-x[t-(\frac{T}{2})]$,如C圖所示。由於該訊號在進行半個週期位移和幅度反轉後重復自身,因此它是一個半波對稱訊號。
正交訊號
如果兩個訊號x(t)和y(t)滿足以下兩個條件,則稱它們為正交訊號。
條件1 − $\int_{-\infty}^{\infty}x(t)y(t) = 0$ [對於非週期訊號]
條件2 − $\int_{T} x(t)y(t)dt = 0$ [對於週期訊號,積分割槽間為一個週期T]
包含奇次諧波(3次、5次、7次……等)且頻率不同的訊號彼此正交。
在三角函式型別訊號中,正弦函式和餘弦函式也彼此正交;前提是它們具有相同的頻率和相位。同樣,直流(直流訊號)和正弦訊號也彼此正交。如果x(t)和y(t)是兩個正交訊號,並且$z(t) = x(t)+y(t)$,則z(t)的功率和能量可以寫成:
$$P(z) = p(x)+p(y)$$ $$E(z) = E(x)+E(y)$$例子
分析訊號:$z(t) = 3+4\sin(2\pi t+30^0)$
這裡,訊號包含一個直流訊號 (3) 和一個正弦函式。因此,根據該性質,該訊號是正交訊號,其中的兩個子訊號彼此正交。
數字訊號處理 - 訊號移位運算
移位是指訊號的移動,可以在時域(圍繞Y軸)或幅度域(圍繞X軸)進行。相應地,我們可以將移位分為兩類,即時間移位和幅度移位,這些將在下面討論。
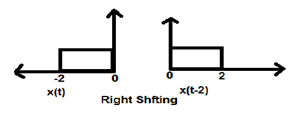
時間移位
時間移位是指在時域中對訊號進行移位。數學上,可以寫成
$$x(t) \rightarrow y(t+k)$$這個k值可以是正的,也可以是負的。根據k值的符號,我們有兩種型別的移位,稱為右移和左移。
情況1 (K > 0)
當K大於零時,訊號在時域中向“左”移動。因此,這種型別的移位稱為訊號的左移。
例子
情況2 (K < 0)
當K小於零時,訊號在時域中向右移動。因此,這種型別的移位稱為右移。
例子
下圖顯示了訊號向右移動2個單位。
幅度移位
幅度移位是指在幅度域(圍繞X軸)對訊號進行移位。數學上,可以表示為:
$$x(t) \rightarrow x(t)+K$$這個K值可以是正的或負的。相應地,我們有兩種型別的幅度移位,將在下面討論。
情況1 (K > 0)
當K大於零時,訊號在x軸上向上移動。因此,這種型別的移位稱為向上移位。
例子
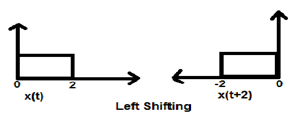
讓我們考慮一個給定的訊號x(t):
$$x = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$讓我們取K=+1,則新的訊號可以寫成:
$y(t) \rightarrow x(t)+1$ 因此,y(t)最終可以寫成:
$$x(t) = \begin{cases}1, & t < 0\\2, & 0\leq t\leq 2\\ 1, & t>0\end{cases}$$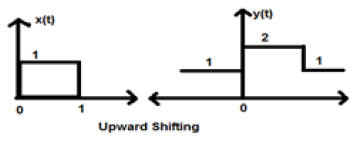
情況2 (K < 0)
當K小於零時,訊號在X軸上向下移動。因此,這稱為訊號的向下移位。
例子
讓我們考慮一個給定的訊號x(t):
$$x(t) = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$讓我們取K = -1,則新的訊號可以寫成:
$y(t)\rightarrow x(t)-1$ 因此,y(t)最終可以寫成:
$$y(t) = \begin{cases}-1, & t < 0\\0, & 0\leq t\leq 2\\ -1, & t>0\end{cases}$$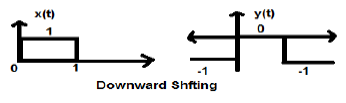
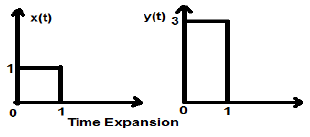
數字訊號處理 - 訊號比例縮放運算
訊號的縮放是指用一個常數乘以訊號的時間或幅度。
時間縮放
如果將一個常數乘以時間軸,則稱為時間縮放。這可以用數學表示為:
$x(t) \rightarrow y(t) = x(\alpha t)$ 或 $x(\frac{t}{\alpha})$; 其中 α ≠ 0
因此,Y軸不變,X軸的幅度根據常數的符號(正或負)而減小或增大。因此,縮放也可以分為兩類,如下所述。
時間壓縮
當alpha大於零時,訊號的幅度將除以alpha,而Y軸的值保持不變。這稱為時間壓縮。
例子
讓我們考慮一個如下圖所示的訊號x(t)。讓我們取alpha的值為2。因此,y(t)將是x(2t),如下圖所示。
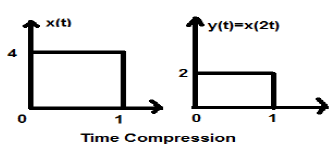
從上圖可以清楚地看出,Y軸的時間幅度保持不變,但X軸的幅度從4減小到2。因此,這是一個時間壓縮的情況。
時間擴充套件
當時間除以常數alpha時,訊號的Y軸幅度將乘以alpha倍,而X軸幅度保持不變。因此,這稱為時間擴充套件型訊號。
例子
讓我們考慮一個幅度為1的方波訊號x(t)。當我們用常數3對其進行時間縮放,使得$x(t) \rightarrow y(t) \rightarrow x(\frac{t}{3})$時,訊號的幅度將修改為3倍,如下圖所示。
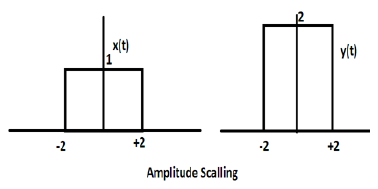
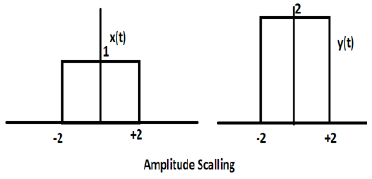
幅度縮放
用一個常數乘以訊號的幅度會導致幅度縮放。根據常數的符號,它可以是幅度縮放或衰減。讓我們考慮一個方波訊號x(t) = Π(t/4)。
假設我們定義另一個函式y(t) = 2 Π(t/4)。在這種情況下,Y軸的值將加倍,而時間軸的值保持不變。如下圖所示。
考慮另一個定義為z(t)的方波函式,其中z(t) = 0.5 Π(t/4)。在這裡,函式z(t)的幅度將是x(t)的一半,即時間軸保持不變,幅度軸將減半。如下圖所示。
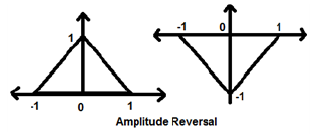
數字訊號處理 - 訊號反轉運算
當訊號中的時間乘以-1時,訊號就會反轉。它會在Y軸或X軸上產生映象。這稱為訊號的反轉。
根據訊號的時間或幅度是否乘以-1,反轉可以分為兩類。
時間反轉
當訊號的時間乘以-1時,稱為訊號的時間反轉。在這種情況下,訊號會在Y軸上產生映象。數學上,可以寫成:
$$x(t) \rightarrow y(t) \rightarrow x(-t)$$下面的例子可以更好地理解這一點。

在上例中,我們可以清楚地看到訊號在其Y軸上反轉了。所以,它也是一種時間縮放,但是這裡的縮放量始終是(-1)。
幅度反轉
當訊號的幅度乘以-1時,稱為幅度反轉。在這種情況下,訊號會在X軸上產生映象。數學上,可以寫成:
$$x(t)\rightarrow y(t)\rightarrow -x(t)$$考慮以下示例。可以清楚地看到幅度反轉。
數字訊號處理 - 訊號微分運算
對訊號進行的兩個非常重要的運算是微分和積分。
微分
任何訊號x(t)的微分是指該訊號相對於時間的斜率表示。數學上,它表示為:
$$x(t)\rightarrow \frac{dx(t)}{dt}$$在運放微分電路中,這種方法非常有用。我們可以很容易地用圖形方式對訊號進行微分,而不是使用公式。但是,條件是訊號必須是矩形或三角形型別的,這在大多數情況下都會發生。
| 原始訊號 | 微分後的訊號 |
|---|---|
| 斜坡訊號 | 階躍訊號 |
| 階躍訊號 | 衝激訊號 |
| 衝激訊號 | 1 |
上表說明了訊號微分後的狀態。例如,斜坡訊號微分後變成階躍訊號。類似地,單位階躍訊號變成衝激訊號。
例子
假設給定的訊號為$x(t) = 4[r(t)-r(t-2)]$。當繪製該訊號時,它看起來如下圖左側所示。現在,我們的目標是對給定的訊號進行微分。
首先,我們將開始對給定的等式進行微分。我們知道斜坡訊號微分後得到單位階躍訊號。
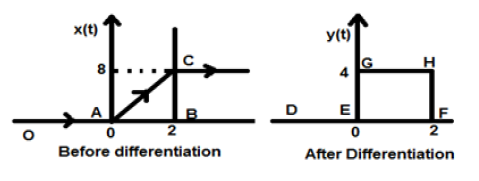
因此,我們得到的訊號y(t)可以寫成:
$y(t) = \frac{dx(t)}{dt}$
$= \frac{d4[r(t)-r(t-2)]}{dt}$
$= 4[u(t)-u(t-2)]$
現在,最終繪製該訊號,如下圖右側所示。
數字訊號處理 - 訊號積分運算
任何訊號的積分是指在特定時間域內對該訊號進行求和以獲得修改後的訊號。數學上,這可以表示為:
$$x(t)\rightarrow y(t) = \int_{-\infty}^{t}x(t)dt$$在這裡,在大多數情況下,我們可以進行數學積分並找到結果訊號,但是對於以矩形格式圖形表示的訊號,可以直接快速進行積分。與微分一樣,這裡我們也參考一個表格來快速獲得結果。
| 原始訊號 | 積分後的訊號 |
|---|---|
| 1 | 衝激訊號 |
| 衝激訊號 | 階躍訊號 |
| 階躍訊號 | 斜坡訊號 |
例子
讓我們考慮一個訊號$x(t) = u(t)-u(t-3)$。它如下圖1所示。我們可以清楚地看到它是一個階躍訊號。現在我們將對其進行積分。參考表格,我們知道階躍訊號的積分得到斜坡訊號。

但是,我們將用數學方法計算它,
$y(t) = \int_{-\infty}^{t}x(t)dt$
$= \int_{-\infty}^{t}[u(t)-u(t-3)]dt$
$= \int_{-\infty}^{t}u(t)dt-\int_{-\infty}^{t}u(t-3)dt$
$= r(t)-r(t-3)$
結果如2圖所示,
數字訊號處理 - 訊號卷積運算
時域中兩個訊號的卷積等效於它們在頻域中的表示的乘積。數學上,我們可以將兩個訊號的卷積寫成
$$y(t) = x_{1}(t)*x_{2}(t)$$ $$= \int_{-\infty}^{\infty}x_{1}(p).x_{2}(t-p)dp$$卷積步驟
- 取訊號x1(t),令t = p,使其變為x1(p)。
- 取訊號x2(t),執行步驟1,使其變為x2(p)。
- 對訊號進行反轉,即x2(-p)。
- 對上述訊號進行時間位移x2[-(p-t)]
- 然後將兩個訊號相乘,即$x_{1}(p).x_{2}[−(p−t)]$
例子
讓我們對階躍訊號u(t)與其自身進行卷積。
$y(t) = u(t)*u(t)$
$= \int_{-\infty}^{\infty}[u(p).u[-(p-t)]dp$
現在這個t可以大於或小於零,如下圖所示
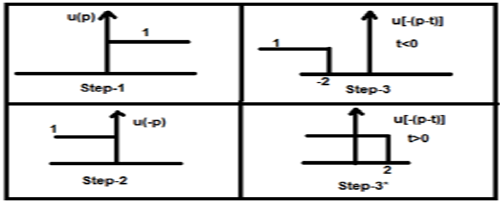
因此,根據上述情況,結果會有以下幾種可能性
$y(t) = \begin{cases}0, & if\quad t<0\\\int_{0}^{t}1dt, & for\quad t>0\end{cases}$
$= \begin{cases}0, & if\quad t<0\\t, & t>0\end{cases} = r(t)$
卷積的性質
交換律
它指出卷積的順序無關緊要,可以用數學表示式表示為:
$$x_{1}(t)*x_{2}(t) = x_{2}(t)*x_{1}(t)$$結合律
它指出涉及三個訊號的卷積順序可以任意。數學上可以表示為:
$$x_{1}(t)*[x_{2}(t)*x_{3}(t)] = [x_{1}(t)*x_{2}(t)]*x_{3}(t)$$分配律
可以先將兩個訊號相加,然後將其卷積結果與第三個訊號進行卷積。這等效於將兩個訊號分別與第三個訊號進行卷積,然後將結果相加。數學上可以寫成:
$$x_{1}(t)*[x_{2}(t)+x_{3}(t)] = [x_{1}(t)*x_{2}(t)+x_{1}(t)*x_{3}(t)]$$面積
如果一個訊號是兩個訊號卷積的結果,那麼該訊號的面積等於這兩個單獨訊號面積的乘積。數學上可以寫成:
如果 $y(t) = x_{1}*x_{2}(t)$
那麼, y(t)的面積 = x1(t)的面積 × x2(t)的面積
尺度變換
如果兩個訊號按某個未知常數“a”進行縮放,然後進行卷積,則結果訊號也將按相同的常數“a”進行縮放,併除以該數量,如下所示。
如果, $x_{1}(t)*x_{2}(t) = y(t)$
那麼, $x_{1}(at)*x_{2}(at) = \frac{y(at)}{a}, a \ne 0$
延時
假設訊號y(t)是兩個訊號x1(t)和x2(t)卷積的結果。如果這兩個訊號分別延遲t1和t2時間,則結果訊號y(t)將延遲(t1+t2)。數學上可以寫成:
如果, $x_{1}(t)*x_{2}(t) = y(t)$
那麼, $x_{1}(t-t_{1})*x_{2}(t-t_{2}) = y[t-(t_{1}+t_{2})]$
例題
例1 − 求訊號u(t-1)和u(t-2)的卷積。
解 − 給定的訊號是u(t-1)和u(t-2)。它們的卷積可以如下所示:
$y(t) = u(t-1)*u(t-2)$
$y(t) = \int_{-\infty}^{+\infty}[u(t-1).u(t-2)]dt$
$= r(t-1)+r(t-2)$
$= r(t-3)$
例2 − 求由以下兩個訊號給出的卷積
$x_{1}(n) = \lbrace 3,-2, 2\rbrace $
$x_{2}(n) = \begin{cases}2, & 0\leq n\leq 4\\0, & x > elsewhere\end{cases}$
解 −
x2(n)可以解碼為 $x_{2}(n) = \lbrace 2,2,2,2,2\rbrace$ (起始點為0)
x1(n)先前給出 $= \lbrace 3,-2,3\rbrace = 3-2Z^{-1}+2Z^{-2}$
類似地, $x_{2}(z) = 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
結果訊號為:
$X(Z) = X_{1}(Z)X_{2}(z)$
$= \lbrace 3-2Z^{-1}+2Z^{-2}\rbrace \times \lbrace 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}\rbrace$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+6Z^{-4}+6Z^{-5}$
對上述結果進行Z反變換,我們將得到結果訊號為:
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$ (起始點為0)
例3 − 確定以下兩個訊號的卷積:
$x(n) = \lbrace 2,1,0,1\rbrace$
$h(n) = \lbrace 1,2,3,1\rbrace$
解 −
對訊號進行Z變換,得到:
$x(z) = 2+2Z^{-1}+2Z^{-3}$
以及 $h(n) = 1+2Z^{-1}+3Z^{-2}+Z^{-3}$
現在,兩個訊號的卷積意味著它們的Z變換的乘積
也就是說 $Y(Z) = X(Z) \times h(Z)$
$= \lbrace 2+2Z^{-1}+2Z^{-3}\rbrace \times \lbrace 1+2Z^{-1}+3Z^{-2}+Z^{-3}\rbrace$
$= \lbrace 2+5Z^{-1}+8Z^{-2}+6Z^{-3}+3Z^{-4}+3Z^{-5}+Z^{-6}\rbrace$
進行Z反變換,結果訊號可以寫成:
$y(n) = \lbrace 2,5,8,6,6,1 \rbrace$ (起始點為0)
數字訊號處理 - 靜態系統
有些系統有反饋,有些沒有。那些沒有反饋系統的系統,其輸出僅取決於輸入的當前值。此時不存在過去的資料值。這類系統稱為靜態系統。它也不依賴於未來的值。
由於這些系統沒有任何過去的記錄,因此它們也沒有任何儲存。因此,我們說所有靜態系統都是無記憶系統。讓我們舉個例子來更好地理解這個概念。
例子
讓我們驗證以下系統是否是靜態系統。
- $y(t) = x(t)+x(t-1)$
- $y(t) = x(2t)$
- $y(t) = x = \sin [x(t)]$
a) $y(t) = x(t)+x(t-1)$
這裡,x(t)是當前值。它與過去的時間值無關。所以,這是一個靜態系統。然而,對於x(t-1),如果我們設t = 0,它將簡化為x(-1),這是一個過去值相關的。所以,它不是靜態的。因此,這裡的y(t)不是靜態系統。
b) $y(t) = x(2t)$
如果我們代入t = 2,結果將是y(t) = x(4)。同樣,它依賴於未來的值。所以,它也不是靜態系統。
c) $y(t) = x = \sin [x(t)]$
在這個表示式中,我們處理的是正弦函式。正弦函式的取值範圍在-1到+1之間。因此,無論我們為x(t)代入什麼值,我們都將得到-1到+1之間的值。因此,我們可以說它不依賴於任何過去或未來的值。因此,它是一個靜態系統。
從上面的例子中,我們可以得出以下結論:
- 任何具有時間位移的系統都不是靜態的。
- 任何具有幅度位移的系統也不是靜態的。
- 積分和微分的情況也不是靜態的。
數字訊號處理 - 動態系統
如果一個系統在任何時刻都依賴於訊號的過去和未來值,那麼它就被稱為動態系統。與靜態系統不同,這些系統不是無記憶系統。它們儲存過去和未來的值。因此,它們需要一些儲存器。讓我們透過一些例子來更好地理解這個理論。
例子
找出以下系統是否是動態的。
a) $y(t) = x(t+1)$
在這種情況下,如果我們在等式中代入t = 1,它將轉換為x(2),這是一個未來相關的值。因為這裡我們輸入的是1,但它顯示的是x(2)的值。由於它是一個未來相關的訊號,所以它顯然是一個動態系統。
b) $y(t) = Real[x(t)]$
$$= \frac{[x(t)+x(t)^*]}{2}$$在這種情況下,無論我們代入什麼值,它都將顯示該時刻的實值訊號。它不依賴於未來或過去的值。因此,它不是動態系統,而是一個靜態系統。
c) $y(t) = Even[x(t)]$
$$= \frac{[x(t)+x(-t)]}{2}$$這裡,如果我們代入t = 1,一個訊號顯示x(1),另一個顯示x(-1),這是一個過去的值。同樣,如果我們代入t = -1,一個訊號將顯示x(-1),另一個將顯示x(1),這是一個未來的值。因此,這顯然是動態系統的情況。
d) $y(t) = \cos [x(t)]$
在這種情況下,由於系統是餘弦函式,它具有一定的值域,介於-1到+1之間。因此,無論我們代入什麼值,我們都將在指定範圍內得到結果。因此,它是一個靜態系統。
從上面的例子中,我們可以得出以下結論:
- 所有時間位移訊號都是動態訊號。
- 在時間縮放的情況下,所有訊號都是動態訊號。
- 積分情況的訊號是動態訊號。
數字訊號處理 - 因果系統
前面我們看到,系統需要獨立於未來的值和過去的值才能成為靜態的。在這種情況下,條件幾乎相同,只是略有修改。這裡,為了使系統具有因果性,它應該只獨立於未來的值。這意味著過去的相關性不會阻止系統成為因果系統。
因果系統是實際上或物理上可實現的系統。讓我們考慮一些例子來更好地理解這一點。
例子
讓我們考慮以下訊號。
a) $y(t) = x(t)$
這裡,訊號只依賴於x的當前值。例如,如果我們代入t = 3,結果將只顯示該時刻的值。因此,由於它不依賴於未來的值,我們可以稱之為因果系統。
b) $y(t) = x(t-1)$
這裡,系統依賴於過去的值。例如,如果我們代入t = 3,表示式將簡化為x(2),這是相對於我們的輸入而言的過去值。在任何情況下,它都不依賴於未來的值。因此,這個系統也是一個因果系統。
c) $y(t) = x(t)+x(t+1)$
在這種情況下,系統有兩個部分。x(t)部分,正如我們前面討論的那樣,只依賴於當前值。所以,這沒問題。但是,如果我們考慮x(t+1)的情況,它顯然依賴於未來的值,因為如果我們代入t = 1,表示式將簡化為x(2),這是一個未來的值。因此,它不是因果的。
DSP - 非因果系統
非因果系統與因果系統正好相反。如果一個系統在任何時刻都依賴於輸入的未來值,則該系統被稱為非因果系統。
例子
讓我們舉一些例子,並嘗試以更好的方式理解這一點。
a) $y(t) = x(t+1)$
我們已經在因果系統中討論過這個系統。對於任何輸入,它都會將系統簡化為其未來的值。例如,如果我們代入t = 2,它將簡化為x(3),這是一個未來的值。因此,該系統是非因果的。
b) $y(t) = x(t)+x(t+2)$
在這種情況下,x(t)純粹是一個依賴於當前值的函式。我們已經討論過x(t+2)函式是依賴於未來的,因為對於t = 3,它將給出x(5)的值。因此,它是非因果的。
c) $y(t) = x(t-1)+x(t)$
在這個系統中,它依賴於給定輸入的當前值和過去的值。無論我們代入什麼值,它都不會顯示任何未來依賴性。顯然,它不是非因果系統;而是一個因果系統。
DSP - 反因果系統
反因果系統只是非因果系統的一個略微修改的版本。系統僅依賴於輸入的未來值。它既不依賴於當前值也不依賴於過去的值。
例子
找出以下系統是否為反因果的。
a) $y(t) = x(t)+x(t-1)$
該系統有兩個子函式。一個子函式x(t+1)依賴於輸入的未來值,但另一個子函式x(t)只依賴於當前值。由於系統除了依賴於未來值外還依賴於當前值,因此該系統不是反因果的。
b) $y(t) = x(t+3)$
如果我們分析上述系統,我們可以看到該系統只依賴於系統的未來值,即如果我們代入t = 0,它將簡化為x(3),這是一個未來值。這個系統是反因果系統的完美例子。
數字訊號處理 - 線性系統
線性系統遵循疊加原理。該定律是證明系統線性的充分必要條件。除此之外,該系統是兩種型別的定律的組合:
- 疊加性原理
- 齊次性原理
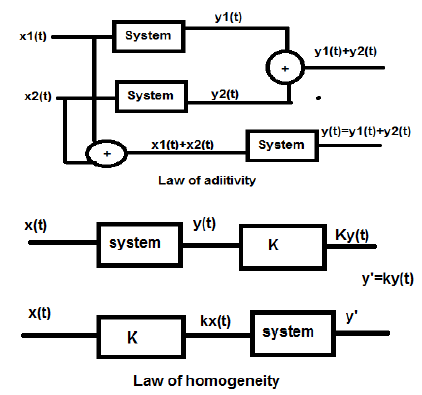
上述圖形顯示了齊次性原理和疊加性原理。但是,還有一些其他條件需要檢查系統是否是線性的。
條件如下:−
- 零輸入對應零輸出。
- 系統中不應存在任何非線性運算元。
非線性運算元的示例:−
(a) 三角函式運算元 - 正弦、餘弦、正切、餘切、正割、餘割等。
(b) 指數、對數、模、平方、立方等。
(c) sa(i/p)、Sinc(i/p)、Sqn(i/p) 等。
輸入 x 或輸出 y 不應包含這些非線性運算元。
例子
讓我們找出以下系統是否是線性的。
a) $y(t) = x(t)+3$
該系統不是線性系統,因為它違反了第一個條件。如果我們將輸入設為零,即 x(t) = 0,則輸出不為零。
b) $y(t) = \sin tx(t)$
在這個系統中,如果我們輸入零,輸出將變為零。因此,第一個條件顯然滿足。同樣,沒有對 x(t) 應用任何非線性運算元。因此,第二個條件也滿足。因此,該系統是線性系統。
c) $y(t) = \sin (x(t))$
在上述系統中,第一個條件滿足,因為如果我們令 x(t) = 0,輸出也將為 sin(0) = 0。但是,第二個條件不滿足,因為存在一個對 x(t) 進行運算的非線性運算元。因此,該系統不是線性的。
DSP - 非線性系統
如果我們想定義這個系統,我們可以說不是線性的系統是非線性系統。顯然,線性系統中被違反的所有條件,在這種情況下都應該滿足。
條件
當輸入為零時,輸出不應為零。
可以在輸入或輸出上應用任何非線性運算元以使系統變為非線性。
例子
確定給定的系統是線性還是非線性。
a) $y(t) = e^{x(t)}$
在上述系統中,第一個條件滿足,因為如果我們將輸入設為零,輸出為 1。此外,指數非線性運算元應用於輸入。顯然,這是一個非線性系統。
b) $y(t) = x(t+1)+x(t-1)$
上述型別的系統同時處理過去和未來的值。但是,如果我們將輸入設為零,則它的值都不存在。因此,我們可以說如果輸入為零,則輸入的時間縮放和時間平移版本也將為零,這違反了我們的第一個條件。同樣,不存在非線性運算元。因此,第二個條件也被違反。顯然,該系統不是非線性系統;而是一個線性系統。
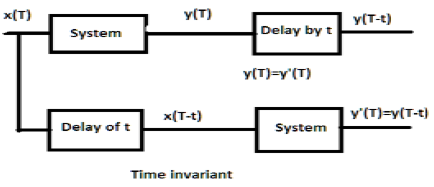
DSP - 時不變系統
對於一個時不變系統,輸出和輸入應該延遲某個時間單位。對於時不變系統,輸入中提供的任何延遲都必須反映在輸出中。
例子
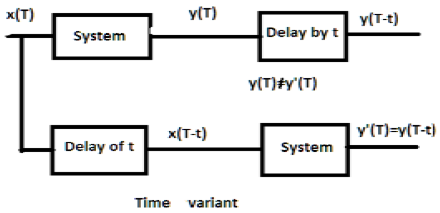
a) $y(T) = x(2T)$
如果上述表示式先透過系統,然後透過時間延遲(如圖上半部分所示);則輸出將變為 $x(2T-2t)$。現在,相同的表示式先透過時間延遲,然後透過系統(如圖下半部分所示)。輸出將變為 $x(2T-t)$。
因此,該系統不是時不變系統。
b) $y(T) = \sin [x(T)]$
如果訊號先透過系統,然後透過時間延遲過程,輸出為 $\sin x(T-t)$。類似地,如果系統先透過時間延遲,然後透過系統,則輸出將為 $\sin x(T-t)$。我們可以清楚地看到,兩個輸出相同。因此,該系統是時不變的。
DSP - 時變系統
對於時變系統,輸出和輸入也應該延遲某個時間常數,但是輸入端的延遲不應反映在輸出上。所有時間縮放的情況都是時變系統的示例。類似地,當系統關係中的係數是時間的函式時,系統也是時變的。
例子
a) $y(t) = x[\cos T]$
如果上述訊號先透過系統,然後透過時間延遲,輸出將為 $x\cos (T-t)$。如果它先透過時間延遲,然後透過系統,它將是 $x(\cos T-t)$。由於輸出不相同,因此該系統是時變的。
b) $y(T) = \cos T.x(T)$
如果上述表示式先透過系統,然後透過時間延遲,則輸出將為 $\cos(T-t)x(T-t)$。但是,如果表示式先透過時間延遲,然後透過系統,則輸出將為 $\cos T.x(T-t)$。由於輸出不相同,顯然該系統是時變的。
數字訊號處理 - 穩定系統
穩定系統滿足 BIBO(有界輸入對應有界輸出)條件。這裡,有界意味著幅度有限。對於穩定系統,對於有限或有界的輸入,在每一個時刻輸出都應該是有限或有界的。
一些有界輸入的例子是正弦、餘弦、直流、符號和單位階躍函式。
例子
a) $y(t) = x(t)+10$
這裡,對於確定的有界輸入,我們可以得到確定的有界輸出,即如果我們令 $x(t) = 2, y(t) = 12$,它本質上是有界的。因此,該系統是穩定的。
b) $y(t) = \sin [x(t)]$
在給定的表示式中,我們知道正弦函式的值有一個確定的邊界,介於 -1 到 +1 之間。因此,無論我們在 x(t) 中代入什麼值,我們都會得到我們邊界內的值。因此,該系統是穩定的。
數字訊號處理 - 不穩定系統
不穩定系統不滿足 BIBO 條件。因此,對於有界輸入,對於不穩定系統,我們不能期望有界輸出。
例子
a) $y(t) = tx(t)$
這裡,對於有限輸入,我們不能期望有限輸出。例如,如果我們令 $x(t) = 2 \Rightarrow y(t) = 2t$。這不是一個有限值,因為我們不知道 t 的值。因此,它的範圍可以從任何地方開始。因此,該系統不穩定。它是一個不穩定系統。
b) $y(t) = \frac{x(t)}{\sin t}$
我們前面已經討論過,正弦函式的範圍從 -1 到 +1;但是這裡它在分母中。因此,在最壞的情況下,如果我們令 t = 0 並且正弦函式變為零,則整個系統將趨於無窮大。因此,這種型別的系統根本不穩定。顯然,這是一個不穩定系統。
DSP - 系統特性解題示例
例 1 − 檢查 $y(t) = x*(t)$ 是線性還是非線性。
解答 − 該函式表示輸入的共軛。可以透過齊次性原理和疊加性原理中的第一定律,或透過兩條規則來驗證。但是,透過規則進行驗證要容易得多,因此我們將採用這種方法。
如果系統的輸入為零,輸出也趨於零。因此,我們的第一個條件滿足。輸入或輸出都沒有使用非線性運算元。因此,該系統是線性的。
例 2 − 檢查 $y(t)=\begin{cases}x(t+1), & t > 0\\x(t-1), & t\leq 0\end{cases}$ 是線性還是非線性。
解答 − 顯然,我們可以看到,當時間小於或等於零時,輸入變為零。因此,我們可以說在零輸入時輸出也為零,並且我們的第一個條件滿足。
同樣,輸入和輸出都沒有使用非線性運算元。因此,該系統是線性的。
例 3 − 檢查 $y(t) = \sin t.x(t)$ 是否穩定。
解答 − 假設我們將 x(t) 的值取為 3。這裡,正弦函式與它相乘,正弦函式的最大值和最小值在 -1 到 +1 之間變化。
因此,整個函式的最大值和最小值也將介於 -3 和 +3 之間。因此,該系統是穩定的,因為這裡我們得到了有界輸入對應有界輸出。
DSP - Z 變換簡介
離散時間傅立葉變換 (DTFT) 存在於能量和功率訊號中。Z 變換也存在於既不是能量也不是功率 (NENP) 型訊號中,但僅限於一定程度。只有對於絕對可和訊號,才使用替換 $z=e^{jw}$ 將 Z 變換轉換為 DTFT。
因此,離散時間訊號 x(n) 的 Z 變換可以用冪級數表示為:−
$$X(z) = \sum_{n-\infty}^\infty x(n)Z^{-n}$$上述方程表示一個雙邊 Z 變換方程。
通常,當訊號進行 Z 變換時,可以表示為:−
$$X(Z) = Z[x(n)]$$或 $x(n) \longleftrightarrow X(Z)$
如果它是連續時間訊號,則不需要 Z 變換,因為使用拉普拉斯變換。但是,只能透過 Z 變換來分析離散時間訊號。
收斂域
收斂域是 Z 平面中復變數 Z 的範圍。訊號的 Z 變換是有限的或收斂的。因此,ROC 表示 X(Z) 具有有限值的 Z 值集合。
ROC 的性質
- ROC 不包含任何極點。
- 對於右側訊號,ROC 將位於 Z 平面中的圓外。
- 對於左側訊號,ROC 將位於 Z 平面中的圓內。
- 為了保證穩定性,ROC 包括 Z 平面中的單位圓。
- 對於雙邊訊號,ROC 是 Z 平面中的環。
- 對於有限持續時間訊號,ROC 是整個 Z 平面。
Z 變換的唯一特徵在於:−
- X(Z) 的表示式
- X(Z) 的 ROC
訊號及其 ROC
| x(n) | X(Z) | ROC |
|---|---|---|
| $\delta(n)$ | $1$ | 整個 Z 平面 |
| $U(n)$ | $1/(1-Z^{-1})$ | Mod(Z)>1 |
| $a^nu(n)$ | $1/(1-aZ^{-1})$ | Mod(Z)>Mod(a) |
| $-a^nu(-n-1)$ | $1/(1-aZ^{-1})$ | Mod(Z)<Mod(a) |
| $na^nu(n)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | Mod(Z)>Mod(a) |
| $-a^nu(-n-1)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | Mod(Z)<Mod(a) |
| $U(n)\cos \omega n$ | $(Z^2-Z\cos \omega)/(Z^2-2Z \cos \omega +1)$ | Mod(Z)>1 |
| $U(n)\sin \omega n$ | $(Z\sin \omega)/(Z^2-2Z \cos \omega +1)$ | Mod(Z)>1 |
例子
讓我們找到給定訊號 $x(n) = \lbrace 7,3,4,9,5\rbrace$ 的 Z 變換和 ROC,其中序列的原點位於 3。
解答 − 應用公式,我們有:−
$X(z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-1}^3 x(n)Z^{-n}$
$= x(-1)Z+x(0)+x(1)Z^{-1}+x(2)Z^{-2}+x(3)Z^{-3}$
$= 7Z+3+4Z^{-1}+9Z^{-2}+5Z^{-3}$
ROC 是整個 Z 平面,不包括 Z = 0,∞,-∞
DSP - Z 變換性質
本章我們將瞭解 Z 變換的基本性質。
線性性
它指出,當兩個或多個單獨的離散訊號乘以常數時,它們的 Z 變換也將乘以相同的常數。
數學上,
$$a_1x_1(n)+a_2x_2(n) = a_1X_1(z)+a_2X_2(z)$$證明 − 我們知道,
$$X(Z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$$$= \sum_{n=-\infty}^\infty (a_1x_1(n)+a_2x_2(n))Z^{-n}$
$= a_1\sum_{n = -\infty}^\infty x_1(n)Z^{-n}+a_2\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= a_1X_1(z)+a_2X_2(z)$ (證畢)
這裡的 ROC 為 $ROC_1\bigcap ROC_2$。
時間移位
時間移位特性描述了離散訊號中時域的變化如何影響 Z 域,可以寫成:
$$x(n-n_0)\longleftrightarrow X(Z)Z^{-n}$$或者 $x(n-1)\longleftrightarrow Z^{-1}X(Z)$
證明 −
設 $y(P) = X(P-K)$
$Y(z) = \sum_{p = -\infty}^\infty y(p)Z^{-p}$
$= \sum_{p = -\infty}^\infty (x(p-k))Z^{-p}$
設 s = p-k
$= \sum_{s = -\infty}^\infty x(s)Z^{-(s+k)}$
$= \sum_{s = -\infty}^\infty x(s)Z^{-s}Z^{-k}$
$= Z^{-k}[\sum_{s=-\infty}^\infty x(m)Z^{-s}]$
$= Z^{-k}X(Z)$ (證畢)
這裡,收斂域可以寫成 Z = 0 (p>0) 或 Z = ∞(p<0)
例子
U(n) 和 U(n-1) 可以繪製如下
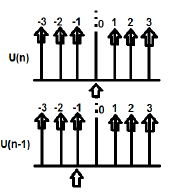
U(n) 的 Z 變換可以寫成:
$\sum_{n = -\infty}^\infty [U(n)]Z^{-n} = 1$
U(n-1) 的 Z 變換可以寫成:
$\sum_{n = -\infty}^\infty [U(n-1)]Z^{-n} = Z^{-1}$
因此 $x(n-n_0) = Z^{-n_0}X(Z)$ (證畢)
時間縮放
時標變換性質告訴我們,當對離散訊號進行時間縮放時,其 Z 域將如何變化,可以寫成:
$$a^nx(n) \longleftrightarrow X(a^{-1}Z)$$證明 −
設 $y(p) = a^{p}x(p)$
$Y(P) = \sum_{p=-\infty}^\infty y(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty a^px(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty x(p)[a^{-1}Z]^{-p}$
$= X(a^{-1}Z)$(證畢)
收斂域:= Mod(ar1) < Mod(Z) < Mod(ar2),其中 Mod = 模
例子
讓我們使用時標變換性質確定 $x(n) = a^n \cos \omega n$ 的 Z 變換。
解 −
我們已經知道訊號 $\cos (\omega n)$ 的 Z 變換為:
$$\sum_{n=-\infty}^\infty(\cos \omega n)Z^{-n} = (Z^2-Z \cos \omega)/(Z^2-2Z\cos \omega +1)$$
現在,應用時標變換性質,$a^n \cos \omega n$ 的 Z 變換可以寫成:
$\sum_{n=-\infty}^\infty(a^n\cos \omega n)Z^{-n} = X(a^{-1}Z)$
$= [(a^{-1}Z)^2-(a^{-1}Z \cos \omega n)]/((a^{-1}Z)^2-2(a^{-1}Z \cos \omega n)+1)$
$= Z(Z-a \cos \omega)/(Z^2-2az \cos \omega+a^2)$
連續微分
連續微分性質表明,當我們對時域中的離散訊號關於時間進行微分時,會發生 Z 變換。如下所示。
$$ \frac{dx(n)}{dn} = (1-Z^{-1})X(Z)$$證明 −
考慮等式的左邊 − $\frac{dx(n)}{dn}$
$$= \frac{[x(n)-x(n-1)]}{[n-(n-1)]}$$$= x(n)-X(n-1)$
$= x(Z)-Z^{-1}x(Z)$
$= (1-Z^{-1})x(Z)$ (證畢)
收斂域:R1< Mod (Z) <R2
例子
讓我們求出由 $x(n) = n^2u(n)$ 給出的訊號的 Z 變換。
根據性質,我們可以寫成
$Zz[nU(n)] = -Z\frac{dZ[U(n)]}{dz}$
$= -Z\frac{d[\frac{Z}{Z-1}]}{dZ}$
$= Z/((Z-1)^2$
$= y(設)
現在,Z[n.y] 可以透過再次應用該性質求出,
$Z(n,y) = -Z\frac{dy}{dz}$
$= -Z\frac{d[Z/(Z-1)^3]}{dz}$
$= Z(Z+1)/(Z-1)^2$
卷積
這描述了當對離散訊號進行卷積運算時,系統 Z 域的變化,可以寫成:
$x_1(n)*x_2(n) \longleftrightarrow X_1(Z).X_2(Z)$
證明 −
$X(Z) = \sum_{n = -\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-\infty}^\infty[\sum_{k = -\infty}^\infty x_1(k)x_2(n-k)]Z^{-n}$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_n^\infty x_2(n-k)Z^{-n}]$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_{n = -\infty}^\infty x_2(n-k)Z^{-(n-k)}Z^{-k}]$
設 n-k = l,則上述方程可以寫成:
$X(Z) = \sum_{k = -\infty}^\infty x_1(k)[Z^{-k}\sum_{l=-\infty}^\infty x_2(l)Z^{-l}]$
$= \sum_{k = -\infty}^\infty x_1(k)X_2(Z)Z^{-k}$
$= X_2(Z)\sum_{k = -\infty}^\infty x_1(Z)Z^{-k}$
$= X_1(Z).X_2(Z)$ (證畢)
收斂域:$ROC_1 \bigcap ROC_2$
例子
讓我們求出由兩個訊號給出的卷積
$x_1(n) = \lbrace 3,-2,2\rbrace$ ...(eq. 1)
$x_2(n) = \lbrace 2,0\leq 4\quad and\quad 0\quad elsewhere\rbrace$ ...(eq. 2)
第一個方程的 Z 變換可以寫成:
$\sum_{n = -\infty}^\infty x_1(n)Z^{-n}$
$= 3-2Z^{-1}+2Z^{-2}$
第二個訊號的 Z 變換可以寫成:
$\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
因此,上述兩個訊號的卷積由下式給出:
$X(Z) = [x_1(Z)^*x_2(Z)]$
$= [3-2Z^{-1}+2Z^{-2}]\times [2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}]$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+...\quad...\quad...$
進行逆 Z 變換,我們得到:
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$
初始值定理
如果 x(n) 是一個因果序列,其 Z 變換為 X(z),則初始值定理可以寫成:
$X(n)(at\quad n = 0) = \lim_{z \to \infty} X(z)$
證明 − 我們知道,
$X(Z) = \sum_{n = 0} ^\infty x(n)Z^{-n}$
展開上述級數,我們得到:
$= X(0)Z^0+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
$= X(0)\times 1+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
在上述情況下,如果 Z → ∞,則 $Z^{-n}\rightarrow 0$ (因為 n>0)
因此,我們可以說:
$\lim_{z \to \infty}X(z) = X(0)$ (證畢)
終值定理
終值定理指出,如果訊號的 Z 變換表示為 X(Z),並且所有極點都在單位圓內,則其終值表示為 x(n) 或 X(∞),可以寫成:
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$
條件 −
- 僅適用於因果系統。
- $X(Z)(1-Z^{-1})$ 在 Z 平面上應該具有位於單位圓內的極點。
證明 − 我們知道
$Z^+[x(n+1)-x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z^+[x(n+1)]-Z^+[x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z[X(Z)^+-x(0)]-X(Z)^+ = \lim_{k \to \infty}\sum_{n = 0}^kZ^{-n}[x(n+1)-x(n)]$
這裡,我們可以應用單邊 Z 變換的高階性質。因此,上述方程可以改寫為:
$Z^+[x(n+1)] = Z[X(2)^+-x(0)Z^0] = Z[X(Z)^+-x(0)]$
現在將 z = 1 代入上述方程,我們可以展開上述方程:
$\lim_{k \to \infty}{[x(1)-x(0)+x(6)-x(1)+x(3)-x(2)+...\quad...\quad...+x(x+1)-x(k)]}$
這可以表述為:
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$(證畢)
例子
讓我們求出 x(n) 的初始值和終值,其訊號由下式給出
$X(Z) = 2+3Z^{-1}+4Z^{-2}$
解 − 首先,讓我們透過應用定理求出訊號的初始值
$x(0) = \lim_{z \to \infty}X(Z)$
$= \lim_{z \to \infty}[2+3Z^{-1}+4Z^{-2}]$
$= 2+(\frac{3}{\infty})+(\frac{4}{\infty}) = 2$
現在讓我們透過應用定理求出訊號的終值
$x(\infty) = \lim_{z \to \infty}[(1-Z^{-1})X(Z)]$
$= \lim_{z \to \infty}[(1-Z^{-1})(2+3Z^{-1}+4Z^{-2})]$
$= \lim_{z \to \infty}[2+Z^{-1}+Z^{-2}-4Z^{-3}]$
$= 2+1+1-4 = 0$
Z 變換的其他一些性質列在下面 −
頻域微分
它給出當對離散訊號關於時間進行微分時,訊號 Z 域的變化。
$nx(n)\longleftrightarrow -Z\frac{dX(z)}{dz}$
其收斂域可以寫成:
$r_2< Mod(Z)< r_1$
例子
讓我們透過頻域微分求出 x(n) 的值,其 Z 域中的離散訊號由 $x(n)\longleftrightarrow X(Z) = log(1+aZ^{-1})$ 給出。
根據性質,我們可以寫成
$nx(n)\longleftrightarrow -Z\frac{dx(Z)}{dz}$
$= -Z[\frac{-aZ^{-2}}{1+aZ^{-1}}]$
$= (aZ^{-1})/(1+aZ^{-1})$
$= 1-1/(1+aZ^{-1})$
$nx(n) = \delta(n)-(-a)^nu(n)$
$\Rightarrow x(n) = 1/n[\delta(n)-(-a)^nu(n)]$
時域乘法
它給出當在離散訊號級別進行乘法運算時,訊號 Z 域的變化。
$x_1(n).x_2(n)\longleftrightarrow(\frac{1}{2\Pi j})[X1(Z)*X2(Z)]$
時域共軛
這描述了 Z 域中共軛離散訊號的表示。
$X^*(n)\longleftrightarrow X^*(Z^*)$
數字訊號處理 - Z 變換存在性
具有系統函式的系統只有當所有極點都位於單位圓內時才能穩定。首先,我們檢查系統是否是因果的。如果系統是因果的,那麼我們進行其 BIBO 穩定性確定;其中 BIBO 穩定性是指有界輸入對應有界輸出的條件。
這可以寫成:
$Mod(X(Z))< \infty$
$= Mod(\sum x(n)Z^{-n})< \infty$
$= \sum Mod(x(n)Z^{-n})< \infty$
$= \sum Mod[x(n)(re^{jw})^{-n}]< 0$
$= \sum Mod[x(n)r^{-n}]Mod[e^{-jwn}]< \infty$
$= \sum_{n = -\infty}^\infty Mod[x(n)r^{-n}]< \infty$
上述方程顯示了 Z 變換存在的條件。
然而,DTFT 訊號存在的條件是
$$ \sum_{n = -\infty}^\infty Mod(x(n)< \infty$$例 1
讓我們嘗試求出訊號的 Z 變換,該訊號表示為
$x(n) = -(-0.5)^{-n}u(-n)+3^nu(n)$
$= -(-2)^nu(n)+3^nu(n)$
解 − 這裡,對於 $-(-2)^nu(n)$,收斂域是左邊的,Z<2
對於 $3^nu(n)$,收斂域是右邊的,Z>3
因此,這裡訊號的 Z 變換不存在,因為沒有公共區域。
例 2
讓我們嘗試求出由下式給出的訊號的 Z 變換
$x(n) = -2^nu(-n-1)+(0.5)^nu(n)$
解 − 這裡,對於 $-2^nu(-n-1)$,訊號的收斂域是左邊的,Z<2
對於訊號 $(0.5)^nu(n)$,收斂域是右邊的,Z>0.5
因此,形成的公共收斂域為 0.5<Z<2
因此,Z 變換可以寫成:
$X(Z) = \lbrace\frac{1}{1-2Z^{-1}}\rbrace+\lbrace\frac{1}{(1-0.5Z)^{-1}}\rbrace$
例 3
讓我們嘗試求出訊號的 Z 變換,該訊號表示為 $x(n) = 2^{r(n)}$
解 − r(n) 是斜坡訊號。因此,訊號可以寫成:
$x(n) = 2^{nu(n)}\lbrace 1, n<0 (u(n)=0)\quad and\quad2^n, n\geq 0(u(n) = 1)\rbrace$
$= u(-n-1)+2^nu(n)$
這裡,對於訊號 $u(-n-1)$,收斂域 Z<1,對於 $2^nu(n)$,收斂域為 Z>2。
因此,訊號的 Z 變換不存在。
因果系統的 Z 變換
因果系統可以定義為 $h(n) = 0,n<0$。對於因果系統,收斂域將在 Z 平面上位於圓外。
$H(Z) = \displaystyle\sum\limits_{n = 0}^{\infty}h(n)Z^{-n}$
展開上述方程,
$H(Z) = h(0)+h(1)Z^{-1}+h(2)Z^{-2}+...\quad...\quad...$
$= N(Z)/D(Z)$
對於因果系統,傳遞函式的展開不包括 Z 的正冪。對於因果系統,分子的階數不能超過分母的階數。這可以寫成:
$\lim_{z \rightarrow \infty}H(Z) = h(0) = 0\quad or\quad Finite$
為了因果系統的穩定性,傳遞函式的極點應該位於 Z 平面的單位圓內。
反因果系統的 Z 變換
反因果系統可以定義為 $h(n) = 0, n\geq 0$。對於反因果系統,傳遞函式的極點應該位於 Z 平面的單位圓外。對於反因果系統,收斂域將在 Z 平面上位於圓內。
數字訊號處理 - Z 變換逆變換
如果我們想分析一個已經用頻域表示的系統,作為離散時間訊號,那麼我們進行逆 Z 變換。
數學上,它可以表示為:
$$x(n) = Z^{-1}X(Z)$$其中 x(n) 是時域中的訊號,X(Z) 是頻域中的訊號。
如果我們想將上述方程表示為積分形式,那麼我們可以將其寫成
$$x(n) = (\frac{1}{2\Pi j})\oint X(Z)Z^{-1}dz$$這裡,積分是在閉合路徑 C 上進行的。該路徑位於 x(z) 的收斂域內,並且包含原點。
求逆 Z 變換的方法
當需要以離散格式進行分析時,我們透過逆 Z 變換將頻域訊號轉換回離散格式。我們採用以下四種方法來確定逆 Z 變換。
- 長除法
- 部分分式展開法
- 留數或輪廓積分法
長除法
在這種方法中,訊號 x (z) 的 Z 變換可以表示為多項式的比率,如下所示:
$$x(z)=N(Z)/D(Z)$$現在,如果我們繼續用分母除以分子,那麼我們將得到如下所示的級數
$$X(z) = x(0)+x(1)Z^{-1}+x(2)Z^{-2}+...\quad...\quad...$$上述序列表示給定訊號的反Z變換序列(對於n≥0),且上述系統是因果的。
然而,對於n<0,該序列可以寫成:
$$x(z) = x(-1)Z^1+x(-2)Z^2+x(-3)Z^3+...\quad...\quad...$$部分分式展開法
在此方法中,訊號也首先表示為N(z)/D(z)的形式。
如果它是有理分數,則表示如下:
$x(z) = (b_0+b_1Z^{-1}+b_2Z^{-2}+...\quad...\quad...+b_mZ^{-m})/(a_0+a_1Z^{-1}+a_2Z^{-2}+...\quad...\quad...+a_nZ^{-n})$
當m
如果該比率不是真分數(即為非真分數),則必須將其轉換為真分數形式才能求解。
留數或輪廓積分法
在這種方法中,我們透過對所有極點處[x(z)Zn-1]的留數求和來獲得反Z變換x(n)。數學上,這可以表示為
$$x(n) = \displaystyle\sum\limits_{所有極點X(z)}[x(z)Z^{n-1}]的留數$$這裡,在z = β處m階極點的留數為
$$留數 = \frac{1}{(m-1)!}\lim_{Z \rightarrow \beta}\lbrace \frac{d^{m-1}}{dZ^{m-1}}\lbrace (z-\beta)^mX(z)Z^{n-1}\rbrace$$數字訊號處理 - Z變換例題
例 1
求解系統s(n+2)-3s(n+1)+2s(n) = δ(n)的響應,其中所有初始條件均為零。
解 − 對上述方程兩邊進行Z變換,得到
$$S(z)Z^2-3S(z)Z+2S(z) = 1$$$\Rightarrow S(z)\lbrace Z^2-3Z+2\rbrace = 1$
$\Rightarrow S(z) = \frac{1}{\lbrace z^2-3z+2\rbrace}=\frac{1}{(z-2)(z-1)} = \frac{\alpha _1}{z-2}+\frac{\alpha _2}{z-1}$
$\Rightarrow S(z) = \frac{1}{z-2}-\frac{1}{z-1}$
對上述方程進行反Z變換,得到
$S(n) = Z^{-1}[\frac{1}{Z-2}]-Z^{-1}[\frac{1}{Z-1}]$
$= 2^{n-1}-1^{n-1} = 2^{n-1}-1$
例 2
求解差分方程描述的系統的系統函式H(z)和單位樣本響應h(n)
$y(n) = \frac{1}{2}y(n-1)+2x(n)$
其中,y(n)和x(n)分別是系統的輸出和輸入。
解 − 對上述差分方程進行Z變換,得到
$Y(z) = \frac{1}{2}Z^{-1}Y(Z)+2X(z)$
$\Rightarrow Y(Z)[1-\frac{1}{2}Z^{-1}] = 2X(Z)$
$\Rightarrow H(Z) = \frac{Y(Z)}{X(Z)} = \frac{2}{[1-\frac{1}{2}Z^{-1}]}$
該系統在Z = 1/2和Z = 0處有極點,且H(Z) = 2/[1-(1/2)Z-1]
因此,對上述式子進行反Z變換,得到
$h(n) = 2(\frac{1}{2})^nU(n)$
例 3
確定下列情況下的Y(z),n≥0:
$y(n)+\frac{1}{2}y(n-1)-\frac{1}{4}y(n-2) = 0\quad 已知\quad y(-1) = y(-2) = 1$
解 − 對上述方程應用Z變換,得到
$Y(Z)+\frac{1}{2}[Z^{-1}Y(Z)+Y(-1)]-\frac{1}{4}[Z^{-2}Y(Z)+Z^{-1}Y(-1)+Y(-2)] = 0$
$\Rightarrow Y(Z)+\frac{1}{2Z}Y(Z)+\frac{1}{2}-\frac{1}{4Z^2}Y(Z)-\frac{1}{4Z}-\frac{1}{4} = 0$
$\Rightarrow Y(Z)[1+\frac{1}{2Z}-\frac{1}{4Z^2}] =\frac{1}{4Z}+\frac{1}{4}$
$\Rightarrow Y(Z)[\frac{4Z^2+2Z-1}{4Z^2}] = \frac{Z+1}{4Z}$
$\Rightarrow Y(Z) = \frac{Z(Z+1)}{4Z^2+2Z-1}$
數字訊號處理 - DFT簡介
與連續時間訊號傅立葉變換類似,離散時間傅立葉變換可用於將離散序列表示為其等效的頻域表示,並用於線性時不變離散時間系統以及開發各種計算演算法。
在連續傅立葉變換中,X(jω)是x(n)的連續函式。然而,DFT處理的是用其頻譜X(ω)的樣本表示x(n)。因此,這種數學工具在方便的表示方面具有重要的計算意義。週期性和非週期性序列都可以透過此工具進行處理。週期性序列需要透過將週期擴充套件到無窮大來進行取樣。
頻域取樣
從引言中可以看出,我們需要知道如何進行頻域取樣,即取樣X(ω)。因此,取樣傅立葉變換和DFT之間的關係如下建立。
同樣,週期性序列可以透過將週期N擴充套件到無窮大來適應此工具。
設一個非週期序列為,$X(n) = \lim_{N \to \infty}x_N(n)$
定義其傅立葉變換為:
$X(\omega ) = \sum_{n=-\infty}^\infty x(n)e^{-jwn}X(K\delta \omega)$
這裡,X(ω)以每個δω弧度間隔週期性地進行取樣。
由於X(ω)在2π弧度內是週期性的,我們只需要在基本範圍內進行取樣。樣本是在0≤ω≤2π的頻率範圍內以等距間隔獲取的。等效間隔之間的間隔為$\delta \omega = \frac{2\pi }{N}$弧度。
現在計算,$\omega = \frac{2\pi}{N}k$
$X(\frac{2\pi}{N}k) = \sum_{n = -\infty}^\infty x(n)e^{-j2\pi nk/N},$ ...公式(2)
其中k=0,1,……N-1
在細分上述式子並交換求和順序後
$X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}[\displaystyle\sum\limits_{l = -\infty}^\infty x(n-Nl)]e^{-j2\pi nk/N}$ ...公式(3)
$\sum_{l=-\infty}^\infty x(n-Nl) = x_p(n) = 一個週期為N的週期函式,其傅立葉級數 = \sum_{k = 0}^{N-1}C_ke^{j2\pi nk/N}$
其中,n = 0,1,…..,N-1;'p'代表週期實體或函式
傅立葉係數為:
$C_k = \frac{1}{N}\sum_{n = 0}^{N-1}x_p(n)e^{-j2\pi nk/N}$k=0,1,…,N-1...公式(4)
比較公式3和4,我們得到:
$NC_k = X(\frac{2\pi}{N}k)$ k=0,1,…,N-1...公式(5)
$NC_k = X(\frac{2\pi}{N}k) = X(e^{jw}) = \displaystyle\sum\limits_{n = -\infty}^\infty x_p(n)e^{-j2\pi nk/N}$...公式(6)
從傅立葉級數展開式:
$x_p(n) = \frac{1}{N}\displaystyle\sum\limits_{k = 0}^{N-1}NC_ke^{j2\pi nk/N} = \frac{1}{N}\sum_{k = 0}^{N-1}X(\frac{2\pi}{N}k)e^{j2\pi nk/N}$...公式(7)
其中n=0,1,…,N-1
在這裡,我們從X(ω)得到了週期訊號。只有當時域中不存在混疊時,才能從xp(n)中提取x(n)。N≥L
N = xp(n)的週期 L= x(n)的週期
$x(n) = \begin{cases}x_p(n), & 0\leq n\leq N-1\\0, & 其他情況\end{cases}$
對映以這種方式實現。
DFT的性質
線性性
它指出,訊號組合的DFT等於各個訊號DFT的和。讓我們取兩個訊號x1(n)和x2(n),其DFT分別為X1(ω)和X2(ω)。因此,如果
$x_1(n)\rightarrow X_1(\omega)$和$x_2(n)\rightarrow X_2(\omega)$
那麼$ax_1(n)+bx_2(n)\rightarrow aX_1(\omega)+bX_2(\omega)$
其中a和b是常數。
對稱性
DFT的對稱性可以像我們推導DTFT對稱性一樣推匯出來。我們知道序列x(n)的DFT用X(K)表示。現在,如果x(n)和X(K)是復值序列,則可以表示為:
$x(n) = x_R(n)+jx_I(n),0\leq n\leq N-1$
和$X(K) = X_R(K)+jX_I(K),0\leq K\leq N-1$
對偶性
讓我們考慮一個訊號x(n),其DFT為X(K)。設有限持續時間序列為X(N)。然後根據對偶定理,
如果,$x(n)\longleftrightarrow X(K)$
那麼,$X(N)\longleftrightarrow Nx[((-k))_N]$
因此,透過使用此定理,如果我們知道DFT,我們可以很容易地找到有限持續時間序列。
複共軛性質
假設有一個訊號x(n),我們也知道它的DFT為X(K)。現在,如果訊號的複共軛為x*(n),那麼我們可以透過使用下面所示的定理很容易地找到DFT,而無需進行大量計算。
如果,$x(n)\longleftrightarrow X(K)$
那麼,$x*(n)\longleftrightarrow X*((K))_N = X*(N-K)$
迴圈頻移
序列x(n)與復指數序列$e^{j2\Pi kn/N}$的乘法相當於DFT在頻率上迴圈移動L個單位。這是迴圈時間移位性質的對偶。
如果,$x(n)\longleftrightarrow X(K)$
那麼,$x(n)e^{j2\Pi Kn/N}\longleftrightarrow X((K-L))_N$
兩個序列的乘法
如果有兩個訊號x1(n)和x2(n),它們各自的DFT為X1(k)和X2(K),則時間序列中訊號的乘法對應於其DFT的迴圈卷積。
如果,$x_1(n)\longleftrightarrow X_1(K)\quad\&\quad x_2(n)\longleftrightarrow X_2(K)$
那麼,$x_1(n)\times x_2(n)\longleftrightarrow X_1(K)© X_2(K)$
帕塞瓦爾定理
對於復值序列x(n)和y(n),一般來說
如果,$x(n)\longleftrightarrow X(K)\quad \&\quad y(n)\longleftrightarrow Y(K)$
那麼,$\sum_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\sum_{k = 0}^{N-1}X(K)Y^*(K)$
數字訊號處理 - DFT時頻變換
我們知道,當$\omega = 2\pi K/N$且$N\rightarrow \infty$時,ω成為一個連續變數,求和的極限變為$-\infty$到$+\infty$。
所以,
$$NC_k = X(\frac{2\pi}{N}k) = X(e^{j\omega}) = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{\frac{-j2\pi nk}{N}} = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{-j\omega n}$$離散時間傅立葉變換 (DTFT)
我們知道,$X(e^{j\omega}) = \sum_{n = -\infty}^\infty x(n)e^{-j\omega n}$
其中,$X(e^{j\omega})$在ω上是連續且週期性的,週期為2π。…公式(1)
現在,
$x_p(n) = \sum_{k = 0}^{N-1}NC_ke^{j2 \pi nk/N}$ … 來自傅立葉級數
$x_p(n) = \frac{1}{2\pi}\sum_{k=0}^{N-1}NC_ke^{j2\pi nk/N}\times \frac{2\pi}{N}$
由於上述原因,ω變為連續的,$\frac{2\pi}{N}\rightarrow d\omega$。
$x(n) = \frac{1}{2\pi}\int_{0}^{2\pi}X(e^{j\omega})e^{j\omega n}d\omega$…公式(2)
離散時間傅立葉逆變換
符號表示為:
$x(n)\Longleftrightarrow x(e^{j\omega})$(傅立葉變換對)
非週期序列x(n)存在離散時間傅立葉變換的充要條件是絕對可和。
即$\sum_{n = -\infty}^\infty|x(n)|<\infty$
DTFT的性質
線性:$a_1x_1(n)+a_2x_2(n)\Leftrightarrow a_1X_1(e^{j\omega})+a_2X_2(e^{j\omega})$
時移 − $x(n-k)\Leftrightarrow e^{-j\omega k}.X(e^{j\omega})$
時間反轉 − $x(-n)\Leftrightarrow X(e^{-j\omega})$
頻移 − $e^{j\omega _0n}x(n)\Leftrightarrow X(e^{j(\omega -\omega _0)})$
頻域微分 − $nx(n) = j\frac{d}{d\omega}X(e^{j\omega})$
卷積 − $x_1(n)*x_2(n)\Leftrightarrow X_1(e^{j\omega})\times X_2(e^{j\omega})$
乘法 − $x_1(n)\times x_2(n)\Leftrightarrow X_1(e^{j\omega})*X_2(e^{j\omega})$
相關 − $y_{x_1\times x_2}(l)\Leftrightarrow X_1(e^{j\omega})*X_2(e^{j\omega})$
調製定理 − $x(n)\cos \omega _0n = \frac{1}{2}[X_1(e^{j(\omega +\omega _0}))+X_2(e^{j(\omega -\omega _0)})]$
對稱性 −$x^*(n)\Leftrightarrow X^*(e^{-j\omega})$;
$x^*(-n)\Leftrightarrow X^*(e^{j\omega})$;
$Real[x(n)]\Leftrightarrow X_{even}(e^{j\omega})$;
$Imag[x(n)]\Leftrightarrow X_{odd}(e^{j\omega})$;
$x_{even}(n)\Leftrightarrow Real[x(e^{j\omega})]$;
$x_{odd}(n)\Leftrightarrow Imag[x(e^{j\omega})]$;
帕塞瓦爾定理 − $\sum_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$
前面我們學習了頻域取樣。利用這些基礎知識,我們在頻域對$X(e^{j\omega})$進行取樣,以便可以根據這些取樣資料進行方便的數字分析。因此,DFT在時域和頻域都進行了取樣。假設x(n) = xp(n)
因此,DFT由下式給出:
$X(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{-\frac{j2\pi nk}{N}}$,k=0,1,….,N−1…式(3)
反離散傅立葉變換(IDFT)定義如下:
$x(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k)e^{\frac{j2\pi nk}{N}}$,n=0,1,….,N−1…式(4)
$\therefore x(n)\Leftrightarrow X(k)$
旋轉因子
旋轉因子記作$W_N$,定義為$W_N = e^{-j2\pi /N}$。其幅度始終保持為1。$W_N$的相位為$-2\pi /N$。它是一個單位圓上的向量,用於計算方便。數學上,它可以表示為:
$W_N^r = W_N^{r\pm N} = W_N^{r\pm 2N} = ...$
它是r的函式,週期為N。
例如,當N = 8時,r = 0,1,2,3,….14,15,16,….
$\Longleftrightarrow W_8^0 = W_8^8 = W_8^{16} = ... = ... = W_8^{32} = ... =1= 1\angle 0$
$W_8^1 = W_8^9 = W_8^{17} = ... = ... = W_8^{33} = ... =\frac{1}{\sqrt 2}e^{-j\frac{\pi}{4}} = 1\angle-\frac{\pi}{4}$
線性變換
讓我們理解線性變換:
我們知道:
$DFT(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \sum_{n = 0}^{N-1}x(n).W_N^{-nk};\quad k = 0,1,….,N−1$
$x(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k).W_N^{nk};\quad n = 0,1,….,N−1$
注意:DFT的計算需要N²次複數乘法和N(N-1)次複數加法。
$x_N = \begin{bmatrix}x(0)\\x(1)\\.\\.\\x(N-1) \end{bmatrix}\quad N\quad 點\quad 訊號\quad 向量\quad x_N$
$X_N = \begin{bmatrix}X(0)\\X(1)\\.\\.\\X(N-1) \end{bmatrix}\quad N\quad 點\quad 訊號\quad 向量\quad X_N$
$\begin{bmatrix}1 & 1 & 1 & ... & ... & 1\\1 & W_N & W_N^2 & ... & ... & W_N^{N-1}\\. & W_N^2 & W_N^4 & ... & ... & W_N^{2(N-1)}\\.\\1 & W_N^{N-1} & W_N^{2(N-1)} & ... & ... & W_N^{(N-1)(N-1)} \end{bmatrix}$
N點DFT的矩陣表示為:$X_N = W_Nx_N$
$W_N\longmapsto$ 線性變換矩陣
$那麼,\quad x_N = W_N^{-1}X_N$
IDFT的矩陣形式為
$$x_N = \frac{1}{N}W_N^*X_N$$比較$x_N$的兩個表示式,可得$W_N^{-1} = \frac{1}{N}W_N^*$ 以及 $W_N\times W_N^* = N[I]_{N\times N}$
因此,$W_N$是一個線性變換矩陣,一個正交(酉)矩陣。
根據$W_N$的週期性和對稱性,可以得出$W_N^{k+N/2} = -W_N^k$
迴圈對稱性
長度為N≤L的有限持續時間序列x(n)的N點DFT,等效於x(n)的週期延拓$x_p(n)$(週期為N)的N點DFT,其中$x_p(n) = \sum_{l = -\infty}^\infty x(n-Nl)$。現在,如果我們將這個週期序列向右平移k個單位,則得到另一個週期序列。這稱為迴圈移位,表示為:
$$x_p^\prime (n) = x_p(n-k) = \sum_{l = -\infty}^\infty x(n-k-Nl)$$新的有限序列可以表示為
$$x_p^\prime (n) = \begin{cases}x_p^\prime(n), & 0\leq n\leq N-1\\0 & 其他情況\end{cases}$$示例:令x(n)= {1,2,4,3}, N = 4,
$x_p^\prime (n) = x(n-k, 模\quad N)\equiv x((n-k))_N\quad;例如,如果\quad k=2,即\quad 向右迴圈移位2個單位,且\quad N = 4,$
假設順時針方向為正方向。
我們得到,$x\prime(n) = x((n-2))_4$
$x\prime(0) = x((-2))_4 = x(2) = 4$
$x\prime(1) = x((-1))_4 = x(3) = 3$
$x\prime(2) = x(0)_4 = x(0) = 1$
$x\prime(3) = x(1)_4 = x(1) = 2$
結論:N點序列的迴圈移位等效於其週期延拓的線性移位,反之亦然。
迴圈偶數序列:$x(N-n) = x(n),\quad 1\leq n\leq N-1$
$即x_p(n) = x_p(-n) = x_p(N-n)$
共軛偶數:$x_p(n) = x_p^*(N-n)$
迴圈奇數序列:$x(N-n) = -x(n),\quad 1\leq n\leq N-1$
$即x_p(n) = -x_p(-n) = -x_p(N-n)$
共軛奇數:$x_p(n) = -x_p^*(N-n)$
現在,$x_p(n) = x_{pe}+x_{po}(n)$,其中:
$x_{pe}(n) = \frac{1}{2}[x_p(n)+x_p^*(N-n)]$
$x_{po}(n) = \frac{1}{2}[x_p(n)-x_p^*(N-n)]$
對於任何實數訊號x(n),$X(k) = X^*(N-k)$
$X_R(k) = X_R(N-k)$
$X_I(k) = -X_I(N-k)$
$\angle X(k) = -\angle X(N-k)$
時間反轉:關於第0個樣本反轉樣本。表示為:
$x((-n))_N = x(N-n),\quad 0\leq n\leq N-1$
時間反轉是順時針方向(即假設為負方向)繪製序列的樣本。
其他一些重要性質
其他重要的IDFT性質 $x(n)\longleftrightarrow X(k)$
時間反轉:$x((-n))_N = x(N-n)\longleftrightarrow X((-k))_N = X(N-k)$
迴圈時間移位:$x((n-l))_N \longleftrightarrow X(k)e^{j2\pi lk/N}$
迴圈頻率移位:$x(n)e^{j2\pi ln/N} \longleftrightarrow X((k-l))_N$
複共軛性質:
$x^*(n)\longleftrightarrow X^*((-k))_N = X^*(N-k)\quad 以及$
$x^*((-n))_N = x^*(N-n)\longleftrightarrow X^*(-k)$
兩個序列的乘積:
$x_1(n)\longleftrightarrow X_1(k)\quad 以及\quad x_2(n)\longleftrightarrow X_2(k)$
$\therefore x_1(n)x_2(n)\longleftrightarrow DFT\{X_1(k) \circ X_2(k)\}$
迴圈卷積:以及兩個DFT的乘積
$x_1(n)\quad 迴圈卷積\quad x_2(n) =\sum_{n = 0}^{N-1}x_1(n).x_2((m-n))_N,\quad m = 0,1,2,... .,N-1 $
$x_1(n)\quad 迴圈卷積\quad x_2(n)\longleftrightarrow X_1(k).X_2(k)$
迴圈相關:如果$x(n)\longleftrightarrow X(k)$ 且 $y(n)\longleftrightarrow Y(k)$,則存在一個互相關序列,記為$\bar Y_{xy}$,使得 $\bar Y_{xy}(l) = \sum_{n = 0}^{N-1}x(n)y^*((n-l))_N = IDFT\{X(k).Y^*(k)\}$
帕塞瓦爾定理:如果$x(n)\longleftrightarrow X(k)$ 且 $y(n)\longleftrightarrow Y(k)$;
$\displaystyle\sum\limits_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\displaystyle\sum\limits_{k =0}^{N-1}X(k).Y^*(k)$
數字訊號處理 - DFT迴圈卷積
讓我們取兩個有限持續時間序列x1(n)和x2(n),其整數長度為N。它們的DFT分別為X1(K)和X2(K),如下所示:
$$X_1(K) = \sum_{n = 0}^{N-1}x_1(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$ $$X_2(K) = \sum_{n = 0}^{N-1}x_2(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$現在,我們將嘗試找到另一個序列x3(n)的DFT,記為X3(K)
$X_3(K) = X_1(K)\times X_2(K)$
透過對上述進行IDFT變換,我們得到
$x_3(n) = \frac{1}{N}\displaystyle\sum\limits_{k = 0}^{N-1}X_3(K)e^{\frac{-j2\Pi kn}{N}}$
求解上述方程後,最終得到
$x_3(n) = \displaystyle\sum\limits_{m = 0}^{N-1}x_1(m)x_2[((n-m))_N]\quad m = 0,1,2...N-1$
| 比較點 | 線性卷積 | 迴圈卷積 |
|---|---|---|
| 移位 | 線性移位 | 迴圈移位 |
| 卷積結果中的樣本數 | $N_1+N_2−1$ | $Max(N_1,N_2)$ |
| 求濾波器的響應 | 可行 | 使用零填充可行 |
迴圈卷積的方法
通常,採用兩種方法進行迴圈卷積,它們是:
- 同心圓法,
- 矩陣乘法法。
同心圓法
設$x_1(n)$和$x_2(n)$為兩個給定的序列。進行$x_1(n)$和$x_2(n)$迴圈卷積的步驟如下:
取兩個同心圓。在外部圓的圓周上逆時針方向繪製$x_1(n)$的N個樣本(保持相鄰點之間的距離相等)。
對於$x_2(n)$的繪製,在內部圓上順時針方向繪製$x_2(n)$的N個樣本,起始樣本與$x_1(n)$的第0個樣本位於同一點。
將兩個圓上對應的樣本相乘,並將結果相加以獲得輸出。
將內部圓逆時針旋轉一個樣本。
矩陣乘法法
矩陣法將兩個給定序列$x_1(n)$和$x_2(n)$表示為矩陣形式。
透過每次迴圈移位一個樣本重複其中一個給定序列,形成一個N X N矩陣。
另一個序列表示為列矩陣。
兩個矩陣的乘積給出迴圈卷積的結果。
數字訊號處理 - DFT線性濾波
DFT提供了一種替代時域卷積的方法。它可以用於在頻域中進行線性濾波。
因此,$Y(\omega) = X(\omega).H(\omega)\longleftrightarrow y(n)$。
這種頻域方法的問題在於,$Y(\omega)$、$X(\omega)$和$H(\omega)$是ω的連續函式,這對於計算機上的數字計算來說並不適用。然而,DFT提供了這些波形的取樣版本來解決這個問題。
其優點是,利用FFT等快速DFT技術,可以開發出比時域方法計算效率更高的數字計算機計算演算法。
考慮一個有限持續時間序列$[x(n) = 0,\quad 當n<0\quad 或\quad n\geq L]$(廣義方程),它激發一個具有脈衝響應$[h(n) = 0,\quad 當n<0\quad 或\quad n\geq M]$的線性濾波器。
$$x(n) * h(n)$$ $$輸出 = y(n) = \sum_{k = 0}^{M-1}h(k).x(n-k)$$從卷積分析可以看出,y(n)的持續時間為L+M−1。
在頻域中,
$$Y(\omega) = X(\omega).H(\omega)$$現在,$Y(\omega)$是ω的連續函式,它在一組離散頻率上進行取樣,不同的樣本數必須等於或超過$L+M-1$。
$$DFT\quad 大小 = N\geq L+M-1$$當$\omega = \frac{2\pi}{N}k$時,
$Y(k) = X(k).H(k)$,其中k=0,1,….,N-1
其中,X(k)和H(k)分別是x(n)和h(n)的N點DFT。x(n)和h(n)用零填充到長度N。這不會扭曲連續頻譜$X(\omega)$和$H(\omega)$。由於$N\geq L+M-1$,輸出序列y(n)的N點DFT足以表示頻域中的y(n),這些事實表明,X(k)和H(k)的N點DFT的乘積,然後計算N點IDFT必須產生y(n)。
這意味著,用零填充的x(n)和H(n)的N點迴圈卷積等於x(n)和h(n)的線性卷積。
因此,DFT可用於線性濾波。
警告:N應始終大於或等於$L+M-1$。否則,混疊效應會破壞輸出序列。
數字訊號處理 - DFT 分段卷積
假設,需要用具有有限持續時間脈衝響應的系統處理長時間輸入序列 x(n),方法是將兩個序列進行卷積。由於透過 DFT 執行的線性濾波涉及對固定大小資料塊的操作,因此在處理之前,輸入序列被分成不同的固定大小資料塊。
然後一次處理連續的塊,並將結果組合以產生最終結果。
由於卷積是透過將長的輸入序列分成不同的固定大小的段來執行的,因此它被稱為分段卷積。在進行 FIR 濾波器處理之前,將長的輸入序列分割成固定大小的塊。
使用兩種方法來評估離散卷積:
重疊保留法
重疊相加法
重疊保留法
重疊保留法是評估非常長的訊號 x(n) 和有限脈衝響應 (FIR) 濾波器 h(n) 之間的離散卷積的有效方法的傳統名稱。以下是重疊保留法的步驟:
設輸入資料塊長度 = N = L+M-1。因此,DFT 和 IDFT 長度 = N。每個資料塊攜帶前一個塊的 M-1 個數據點,然後是 L 個新的資料點,形成長度為 N = L+M-1 的資料序列。
首先,計算每個資料塊的 N 點 DFT。
透過附加 (L-1) 個零,FIR 濾波器的脈衝響應的長度增加,並計算和儲存 N 點 DFT。
兩個 N 點 DFT H(k) 和 Xm(k) 的乘法:Y′m(k) = H(k)·Xm(k),其中 K=0,1,2,…N-1
然後,IDFT[Y′m(k)] = y′(n) = [y′m(0), y′m(1), y′m(2),.......y′m(M-1), y′m(M),.......y′m(N-1)]
(這裡,N-1 = L+M-2)
由於混疊,前 M-1 個點被破壞,因此它們被丟棄,因為資料記錄的長度為 N。
最後 L 個點與卷積的結果完全相同,因此
y′m(n) = ym(n),其中 n = M, M+1,…,N-1
為了避免混疊,儲存每個資料記錄的最後 M-1 個元素,這些點被傳遞到後續記錄併成為第 1 個 M-1 個元素。

IDFT 的結果,其中避免了前 M-1 個點以消除混疊,其餘 L 個點構成與線性卷積相同的期望結果。
重疊相加法
以下是使用重疊相加法求出離散卷積的步驟:
設輸入資料塊大小為 L。因此,DFT 和 IDFT 的大小:N = L+M-1
每個資料塊在最後附加 M-1 個零。
計算 N 點 DFT。

兩個 N 點 DFT 相乘:Ym(k) = H(k)·Xm(k),其中 k = 0,1,2,…,N-1
IDFT[Ym(k)] 生成長度為 N 的塊,這些塊不受混疊的影響,因為 DFT 的大小為 N = L+M-1,並且透過向每個塊附加 M-1 個零將序列的長度增加到 N 點。
每個塊的最後 M-1 個點必須與後續塊的前 M-1 個點重疊並相加。
(原因:每個資料塊以 M-1 個零結尾)
因此,這種方法被稱為重疊相加法。因此,我們得到:
y(n) = {y1(0), y1(1), y1(2), ... ..., y1(L-1), y1(L)+y2(0), y1(L+1)+y2(1), ... ... ..., y1(N-1)+y2(M-1),y2(M), ... ... ... ... ...}
數字訊號處理 - DFT 離散餘弦變換
DCT(離散餘弦變換)將 N 個輸入序列 x(n),0≤n≤N-1,表示為復指數的線性變換或組合。結果,即使 x(n) 是實數,DFT 係數通常也是複數。
假設,我們嘗試找到一個具有 N×N 結構的正交變換,該變換將實數序列 x(n) 表示為餘弦序列的線性組合。我們已經知道:
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)\cos\frac{2\Pi kn}{N},0\leq k \leq N-1$
並且 $x(n) = \frac{1}{N}\sum_{k = 0}^{N-1}x(k)\cos\frac{2\Pi kn}{N},0\leq k \leq N-1$
如果 N 點序列 x(n) 是實數且為偶數,則這是可能的。因此,$x(n) = x(N-n),0\leq n \leq (N-1)$。生成的 DFT 本身是實數且為偶數。這些都表明我們可以透過對序列的“偶數擴充套件”進行 2N 點 DFT 來為任何 N 點實數序列設計離散餘弦變換。
DCT 主要用於影像和語音處理。它也用於影像和語音訊號的壓縮。
$DFT[s(n)] = S(k) = \sum_{n = 0}^{2N-1}s(n)W_{2N}^{nk},其中 0\leq k \leq 2N-1$
$S(k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)W_{2N}^{nk}+\displaystyle\sum\limits_{n = N}^{2N-1}x(2N-n-1)W_{2N}^{nk};其中 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{-k/2}+\sum_{n = 0}^{N-1}x(n) [W_{2N}^{nk}W_{2N}^{k/2}+W_{2N}^{-nk}W_{2N}^{-k/2}];其中 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{N}(n+\frac{1}{2})k];其中 0\leq k\leq 2N-1$
DCT 定義為:
$V(k) = 2\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{2}(n+\frac{1}{2})k],其中 0\leq k\leq N-1$
$\Rightarrow V(k) = W_{2N}^{\frac{k}{2}}S(k) 或 S(k) = W_{2N}^{\frac{k}{2}}V(k),其中 0\leq k\leq N-1$
$\Rightarrow V(k) = 2R[W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)W_{2N}^{nk}],其中 0\leq k\leq N-1$
數字訊號處理 - DFT 例題
例 1
驗證序列 $x(n) = \frac{1^n}{4}u(n)$ 的帕塞瓦爾定理
**解**:
$\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$左邊 $\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2$
$= \displaystyle\sum\limits_{-\infty}^{\infty}x(n)x^*(n)$
$= \displaystyle\sum\limits_{-\infty}^\infty(\frac{1}{4})^{2n}u(n) = \frac{1}{1-\frac{1}{16}} = \frac{16}{15}$
右邊 $X(e^{j\omega}) = \frac{1}{1-\frac{1}{4}e^{-j\omega}} = \frac{1}{1-0.25\cos \omega+j0.25\sin \omega}$
$\Longleftrightarrow X^*(e^{j\omega}) = \frac{1}{1-0.25\cos \omega-j0.25\sin \omega}$
計算,$X(e^{j\omega})·X^*(e^{j\omega})$
$= \frac{1}{(1-0.25\cos \omega)^2+(0.25\sin \omega)^2} = \frac{1}{1.0625-0.5\cos \omega}$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega = 16/15$
我們可以看到,左邊 = 右邊。(證畢)
例 2
計算 $x(n) = 3\delta (n)$ 的 N 點 DFT
**解**:我們知道:
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
$= \displaystyle\sum\limits_{n = 0}^{N-1}3\delta(n)e^{\frac{j2\Pi kn}{N}}$
$ = 3\delta (0)\times e^0 = 3$
所以$x(k) = 3, 0\leq k\leq N-1$… 答案
例 3
計算 $x(n) = 7\delta(n-n_0)$ 的 N 點 DFT
**解**:我們知道:
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
代入 x(n) 的值,
$\displaystyle\sum\limits_{n = 0}^{N-1}7\delta (n-n_0)e^{-\frac{j2\Pi kn}{N}}$
$= 7e^{-j2\Pi kn_0/N}$… 答案
DSP - 快速傅立葉變換
在早期的 DFT 方法中,我們看到計算部分太長了。我們想減少它。這可以透過 FFT 或快速傅立葉變換來實現。所以,我們可以說 FFT 無非是以演算法的形式計算離散傅立葉變換,其中計算部分將減少。
FFT 的主要優點是,透過它,我們可以設計 FIR 濾波器。從數學上講,FFT 可以寫成:
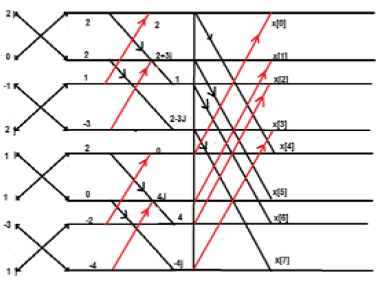
$$x[K] = \displaystyle\sum\limits_{n = 0}^{N-1}x[n]W_N^{nk}$$讓我們舉一個例子來更好地理解它。我們考慮了從 $x_0$ 到 $x_7$ 的八個點。我們將偶數項放在一組,奇數項放在另一組。上述內容的圖表如下所示:
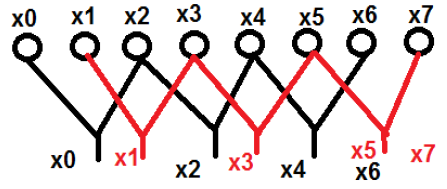
這裡,點 x0、x2、x4 和 x6 被歸為一類,同樣,點 x1、x3、x5 和 x7 被歸為另一類。現在,我們可以進一步將它們分成兩組,並繼續進行計算。現在,讓我們看看這些進一步分成兩組如何幫助計算。
$x[k] = \displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r]W_N^{2rk}+\displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_N^{(2r+1)k}$
$= \sum_{r = 0}^{\frac{N}{2}-1}x[2r]W_{N/2}^{rk}+\sum_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_{N/2}^{rk}\times W_N^k$
$= G[k]+H[k]\times W_N^k$
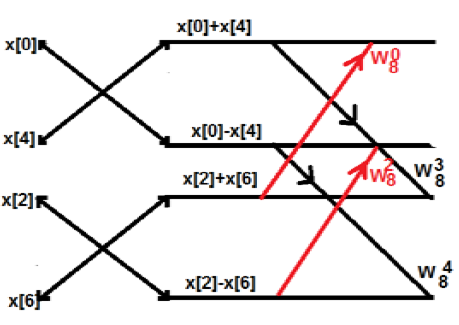
最初,我們採用了一個八點序列,但後來將其分成兩部分 G[k] 和 H[k]。G[k] 代表偶數部分,而 H[k] 代表奇數部分。如果我們想透過圖表來實現它,那麼它可以顯示如下:
![Eight Point H[k]G[k]1](/digital_signal_processing/images/eight_point_h_g1.jpg)
![Eight Point H[k]G[k]2](/digital_signal_processing/images/eight_point_h_g2.jpg)
從上圖可以看出
$W_8^4 = -1$
$W_8^5 = -W_8^1$
$W_8^6 = -W_8^2$
$W_8^7 = -W_8^3$
同樣,最終值可以寫成:
$G[0]+H[0] = x[0]$
$G[1]+W_8^1H[1] = x[1]$
$G[2]+W_8^2H[2] = x[2]$
$G[3]+W_8^3H[3] = x[3]$
以上是一個週期性序列。該系統的缺點是 K 不能分解到 4 點以下。現在讓我們進一步分解上述內容。我們將得到類似這樣的結構
例子
考慮序列 x[n]={ 2,1,-1,-3,0,1,2,1}。計算 FFT。
**解**:給定序列為 x[n]={ 2,1,-1,-3,0,1,2,1}
按如下所示排列各項;
DSP - 原地計算
這種高效的記憶體使用對於設計用於計算 FFT 的快速硬體非常重要。術語“就地計算”用於描述這種記憶體使用。
按時間抽取序列
在這種結構中,我們將所有點表示為二進位制格式,即 0 和 1。然後,我們反轉這些結構。我們之後得到的序列稱為位反轉序列。這也被稱為按時間抽取序列。八點 DFT 的就地計算以表格格式顯示如下:
| 點 | 二進位制格式 | 反轉 | 等效點 |
|---|---|---|---|
| 0 | 000 | 000 | 0 |
| 1 | 001 | 100 | 4 |
| 2 | 010 | 010 | 2 |
| 3 | 011 | 110 | 6 |
| 4 | 100 | 001 | 1 |
| 5 | 101 | 101 | 5 |
| 6 | 110 | 011 | 3 |
| 7 | 111 | 111 | 7 |

按頻率抽取序列
除了時間序列之外,N 點序列也可以用頻率表示。讓我們以一個四點序列為例來更好地理解它。
設序列為 $x[0], x[1], x[2], x[3], x[4], x[5], x[6], x[7]$。最初,我們將兩個點組合成一組。從數學上講,這個序列可以寫成:
$$x[k] = \sum_{n = 0}^{N-1}x[n]W_N^{nk}$$現在讓我們將序列號 0 到 3 組成一組,將序列 4 到 7 組成另一組。現在,從數學上可以表示為:
$$ \displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[n]W_N^{nk}+\displaystyle\sum\limits_{n = N/2}^{N-1}x[n]W_N^{nk} $$令 r 代替 n,其中 r = 0, 1, 2….(N/2-1)。數學表示式為:
$$ \displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[r]W_{N/2}^{nr} $$我們首先取前四個點 (x[0], x[1], x[2], x[3]),並嘗試用以下數學表示式表示它們:
$$ \sum_{n = 0}^3x[n]W_8^{nk}+\sum_{n = 0}^3x[n+4]W_8^{(n+4)k} $$
$$ = \lbrace \sum_{n = 0}^3x[n]+\sum_{n = 0}^3x[n+4]W_8^{4k}\rbrace \times W_8^{nk} $$
現在 $X[0] = \sum_{n = 0}^3(X[n]+X[n+4])$
$X[1] = \sum_{n = 0}^3(X[n]+X[n+4])W_8^{nk}$
$= [X[0]-X[4]+(X[1]-X[5])W_8^1+(X[2]-X[6])W_8^2+(X[3]-X[7])W_8^3$
我們可以進一步將其分解為兩個部分,這意味著我們可以將其分解為2點序列,而不是4點序列。
DSP - 計算機輔助設計
FIR濾波器在計算機輔助濾波器設計中非常有用。讓我們來看一個例子,看看它是如何工作的。下面是所需濾波器的圖形。
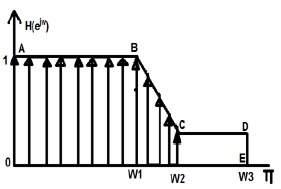
在計算機設計中,我們將整個連續圖形分解成離散值。在一定的範圍內,我們將其分成64、256或512(等等)個具有離散幅度的部分。
在上面的例子中,我們取-π到+π之間的範圍。我們將其分成256個部分。這些點可以表示為H(0), H(1),….直到H(256)。在這裡,我們應用IDFT演算法,這將給出線性相位特性。
有時,我們可能對某種特定階數的濾波器感興趣。假設我們想透過9階濾波器實現上述設計。因此,我們取濾波器值為h0, h1, h2….h9。數學表示式如下所示
$$H(e^{j\omega}) = h_0+h_1e^{-j\omega}+h_2e^{-2j\omega}+.....+h_9e^{-9j\omega}$$在存在大量不連續點的地方,我們取最大點數。
例如,在上圖中,點B和C之間存在斜率的突然下降。因此,我們試圖在此點取更多離散值,但在點C和D之間存在恆定斜率。在那裡,我們取較少的離散值。
為了設計上述濾波器,我們進行如下最小化過程:
$H(e^{j\omega1}) = h_0+h_1e^{-j\omega1}+h_2e^{-2j\omega1}+.....+h_9e^{-9j\omega1}$
$H(e^{j\omega2}) = h_0+h_1e^{-j\omega2}+h_2e^{-2j\omega2}+.....+h_9e^{-9j\omega2}$
以此類推,
$(e^{j\omega1000}) = h_0+h_1e^{-j\omega1000}+h_2e^{-2j\omega1000}+.....+h_9e^{-9j\omega1000}$
將上述方程表示為矩陣形式,我們有:
$$ \begin{bmatrix}H(e^{j\omega_1})\\.\\.\\H(e^{j\omega_{1000}}) \end{bmatrix} = \begin{bmatrix}e^{-j\omega_1} & ... & e^{-j9\omega_1} \\. & & . \\. & & . \\e^{-j\omega_{1000}} &... & e^{-j9\omega_{1000}} \end{bmatrix}\begin{bmatrix}h_0\\.\\.\\h_9\end{bmatrix} $$令1000×1矩陣為B,1000×9矩陣為A,9×1矩陣為$\hat{h}$。
因此,為了求解上述矩陣,我們將寫成
$\hat{h} = [A^TA]^{-1}A^{T}B$
$= [A^{*T}A]^{-1}A^{*T}B$
其中A*表示矩陣A的共軛轉置。