- Mahotas 教程
- Mahotas - 首頁
- Mahotas - 簡介
- Mahotas - 計算機視覺
- Mahotas - 歷史
- Mahotas - 特性
- Mahotas - 安裝
- Mahotas 影像處理
- Mahotas - 影像處理
- Mahotas - 載入影像
- Mahotas - 載入灰度影像
- Mahotas - 顯示影像
- Mahotas - 顯示影像形狀
- Mahotas - 儲存影像
- Mahotas - 影像質心
- Mahotas - 影像卷積
- Mahotas - 建立RGB影像
- Mahotas - 影像尤拉數
- Mahotas - 影像中零的比例
- Mahotas - 獲取影像矩
- Mahotas - 影像區域性最大值
- Mahotas - 影像橢圓軸
- Mahotas - 影像RGB拉伸
- Mahotas 顏色空間轉換
- Mahotas - 顏色空間轉換
- Mahotas - RGB轉灰度轉換
- Mahotas - RGB轉LAB轉換
- Mahotas - RGB轉褐色
- Mahotas - RGB轉XYZ轉換
- Mahotas - XYZ轉LAB轉換
- Mahotas - XYZ轉RGB轉換
- Mahotas - 增加伽馬校正
- Mahotas - 拉伸伽馬校正
- Mahotas 標記影像函式
- Mahotas - 標記影像函式
- Mahotas - 標記影像
- Mahotas - 過濾區域
- Mahotas - 邊界畫素
- Mahotas - 形態學運算
- Mahotas - 形態學運算元
- Mahotas - 查詢影像均值
- Mahotas - 裁剪影像
- Mahotas - 影像偏心率
- Mahotas - 影像疊加
- Mahotas - 影像圓度
- Mahotas - 調整影像大小
- Mahotas - 影像直方圖
- Mahotas - 影像膨脹
- Mahotas - 影像腐蝕
- Mahotas - 分水嶺演算法
- Mahotas - 影像開運算
- Mahotas - 影像閉運算
- Mahotas - 填充影像空洞
- Mahotas - 條件膨脹影像
- Mahotas - 條件腐蝕影像
- Mahotas - 影像條件分水嶺演算法
- Mahotas - 影像區域性最小值
- Mahotas - 影像區域最大值
- Mahotas - 影像區域最小值
- Mahotas - 高階概念
- Mahotas - 影像閾值化
- Mahotas - 設定閾值
- Mahotas - 軟閾值
- Mahotas - Bernsen 區域性閾值化
- Mahotas - 小波變換
- 製作影像小波中心
- Mahotas - 距離變換
- Mahotas - 多邊形工具
- Mahotas - 區域性二值模式
- 閾值鄰接統計
- Mahotas - Haralic 特徵
- 標記區域的權重
- Mahotas - Zernike 特徵
- Mahotas - Zernike 矩
- Mahotas - 排序濾波器
- Mahotas - 2D 拉普拉斯濾波器
- Mahotas - 多數濾波器
- Mahotas - 均值濾波器
- Mahotas - 中值濾波器
- Mahotas - Otsu 方法
- Mahotas - 高斯濾波
- Mahotas - Hit & Miss 變換
- Mahotas - 標記最大值陣列
- Mahotas - 影像均值
- Mahotas - SURF 密集點
- Mahotas - SURF 積分影像
- Mahotas - Haar 變換
- 突出顯示影像最大值
- 計算線性二值模式
- 獲取標籤邊界
- 反轉 Haar 變換
- Riddler-Calvard 方法
- 標記區域的大小
- Mahotas - 模板匹配
- 加速魯棒特徵
- 移除帶邊框的標記
- Mahotas - Daubechies 小波
- Mahotas - Sobel 邊緣檢測
Mahotas - Sobel 邊緣檢測
Sobel 邊緣檢測是一種用於識別影像中邊緣的演算法。邊緣代表不同區域之間的邊界。它的工作原理是計算每個畫素的影像強度梯度。
簡單來說,它測量畫素值的改變以確定高變化區域,這些區域對應於影像中的邊緣。
Mahotas 中的 Sobel 邊緣檢測
在 Mahotas 中,我們可以使用 **mahotas.sobel()** 函式來檢測影像中的邊緣。
Sobel 函式使用兩個單獨的濾波器,一個用於水平變化 (Gx),另一個用於垂直變化 (Gy)。
這些濾波器透過卷積與影像的畫素值應用於影像。這計算了水平和垂直方向的梯度。
一旦獲得兩個方向的梯度,Sobel 函式就會將它們組合起來計算每個畫素的整體梯度幅度。
這是使用勾股定理完成的,它計算水平和垂直梯度的平方和的平方根。
$$\mathrm{M\:=\:\sqrt{(Gx^{2}\:+\:Gy^{2})}}$$
影像的最終梯度幅度 (M) 表示原始影像中邊緣的強度。較高的值表示較強的邊緣,而較低的值對應於較平滑的區域。
mahotas.sobel() 函式
mahotas.sobel() 函式接收灰度影像作為輸入,並返回二值影像作為輸出,其中邊緣使用 Sobel 邊緣檢測演算法計算。
結果影像中的白色畫素表示邊緣,而黑色畫素表示其他區域。
語法
以下是 Mahotas 中 sobel() 函式的基本語法:
mahotas.sobel(img, just_filter=False)
其中:
**img** - 輸入灰度影像。
**just_filter (可選)** - 一個標誌,用於指定是否對濾波後的影像進行閾值化(預設值為 false)。
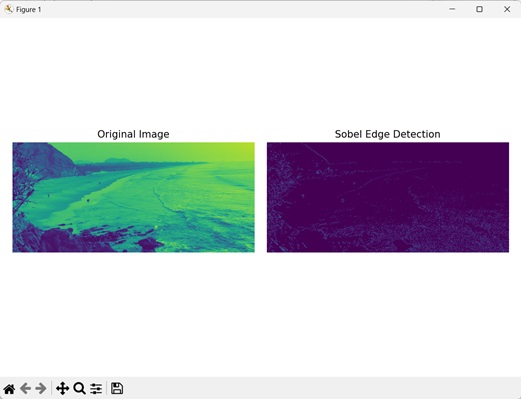
示例
在下面的示例中,我們使用 Sobel 邊緣檢測演算法來使用 mh.sobel() 函式檢測邊緣。
import mahotas as mh
import numpy as np
import matplotlib.pyplot as mtplt
# Loading the image
image = mh.imread('sea.bmp')
# Converting it to grayscale
image = mh.colors.rgb2gray(image)
# Applying sobel gradient to detect edges
sobel = mh.sobel(image)
# Creating a figure and axes for subplots
fig, axes = mtplt.subplots(1, 2)
# Displaying the original image
axes[0].imshow(image)
axes[0].set_title('Original Image')
axes[0].set_axis_off()
# Displaying the edges
axes[1].imshow(sobel)
axes[1].set_title('Sobel Edge Detection')
axes[1].set_axis_off()
# Adjusting spacing between subplots
mtplt.tight_layout()
# Showing the figures
mtplt.show()
輸出
以下是上述程式碼的輸出:
未進行閾值化的輸出影像
我們還可以不進行閾值化輸出影像來執行 Sobel 邊緣檢測演算法。閾值化是指透過將畫素分類為前景或背景來將影像轉換為二值影像。
轉換是透過將畫素的強度值與閾值(固定)值進行比較來實現的。
在 Mahotas 中,sobel() 函式中的 **just_filter** 引數決定是否對輸出影像進行閾值化。我們可以將此引數設定為“True”以防止對輸出影像進行閾值化。
如果過濾器設定為“False”,則會對輸出影像進行閾值化。
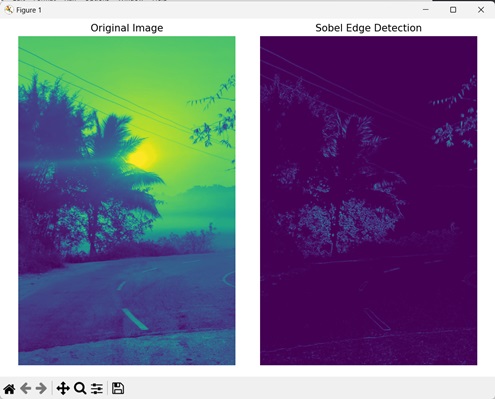
示例
在下面提到的示例中,我們在使用 Sobel 邊緣檢測演算法時沒有對輸出影像進行閾值化。
import mahotas as mh
import numpy as np
import matplotlib.pyplot as mtplt
# Loading the image
image = mh.imread('sun.png')
# Converting it to grayscale
image = mh.colors.rgb2gray(image)
# Applying sobel gradient to detect edges
sobel = mh.sobel(image, just_filter=True)
# Creating a figure and axes for subplots
fig, axes = mtplt.subplots(1, 2)
# Displaying the original image
axes[0].imshow(image)
axes[0].set_title('Original Image')
axes[0].set_axis_off()
# Displaying the edges
axes[1].imshow(sobel)
axes[1].set_title('Sobel Edge Detection')
axes[1].set_axis_off()
# Adjusting spacing between subplots
mtplt.tight_layout()
# Showing the figures
mtplt.show()
輸出
執行上述程式碼後,我們將得到以下輸出:
在閾值影像上
Sobel 邊緣檢測也可以在閾值影像上執行。閾值影像是一個二值影像,其中畫素被分類為前景或背景。
前景畫素為白色,用值 1 表示,而背景畫素為黑色,用值 0 表示。
在 Mahotas 中,我們首先使用任何閾值化演算法對輸入影像進行閾值化。讓我們假設Bernsen 閾值化演算法。這可以透過在灰度影像上使用 mh.thresholding.bernsen() 函式來完成。
然後,我們應用 Sobel 邊緣檢測演算法來檢測閾值影像的邊緣。
示例
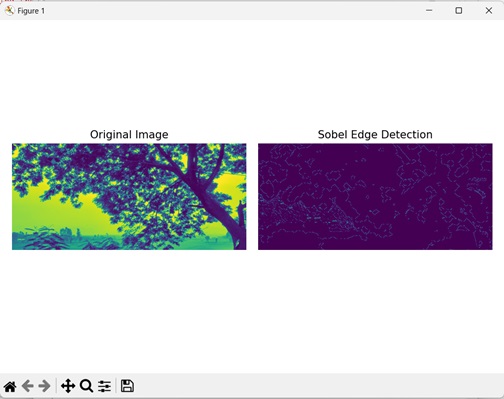
在這裡,我們正在使用 Sobel 邊緣檢測演算法在閾值影像上檢測影像的邊緣。
import mahotas as mh
import numpy as np
import matplotlib.pyplot as mtplt
# Loading the image
image = mh.imread('tree.tiff')
# Converting it to grayscale
image = mh.colors.rgb2gray(image)
# Applying threshold on the image
threshold_image = mh.thresholding.bernsen(image, 17, 19)
# Applying sobel gradient to detect edges
sobel = mh.sobel(threshold_image)
# Creating a figure and axes for subplots
fig, axes = mtplt.subplots(1, 2)
# Displaying the original image
axes[0].imshow(image)
axes[0].set_title('Original Image')
axes[0].set_axis_off()
# Displaying the edges
axes[1].imshow(sobel)
axes[1].set_title('Sobel Edge Detection')
axes[1].set_axis_off()
# Adjusting spacing between subplots
mtplt.tight_layout()
# Showing the figures
mtplt.show()
輸出
執行上述程式碼後,我們將得到以下輸出: