- Mahotas 教程
- Mahotas - 首頁
- Mahotas - 簡介
- Mahotas - 計算機視覺
- Mahotas - 歷史
- Mahotas - 特性
- Mahotas - 安裝
- Mahotas 處理影像
- Mahotas - 處理影像
- Mahotas - 載入影像
- Mahotas - 載入灰度影像
- Mahotas - 顯示影像
- Mahotas - 顯示影像形狀
- Mahotas - 儲存影像
- Mahotas - 影像的質心
- Mahotas - 影像卷積
- Mahotas - 建立 RGB 影像
- Mahotas - 影像的尤拉數
- Mahotas - 影像中零值的比例
- Mahotas - 獲取影像矩
- Mahotas - 影像中的區域性最大值
- Mahotas - 影像橢圓軸
- Mahotas - 影像拉伸 RGB
- Mahotas 顏色空間轉換
- Mahotas - 顏色空間轉換
- Mahotas - RGB 到灰度轉換
- Mahotas - RGB 到 LAB 轉換
- Mahotas - RGB 到 Sepia 轉換
- Mahotas - RGB 到 XYZ 轉換
- Mahotas - XYZ 到 LAB 轉換
- Mahotas - XYZ 到 RGB 轉換
- Mahotas - 增加伽馬校正
- Mahotas - 拉伸伽馬校正
- Mahotas 標籤影像函式
- Mahotas - 標籤影像函式
- Mahotas - 影像標記
- Mahotas - 過濾區域
- Mahotas - 邊界畫素
- Mahotas - 形態學操作
- Mahotas - 形態學運算元
- Mahotas - 查詢影像均值
- Mahotas - 裁剪影像
- Mahotas - 影像的偏心率
- Mahotas - 影像疊加
- Mahotas - 影像的圓形度
- Mahotas - 影像縮放
- Mahotas - 影像直方圖
- Mahotas - 影像膨脹
- Mahotas - 影像腐蝕
- Mahotas - 分水嶺演算法
- Mahotas - 影像開運算
- Mahotas - 影像閉運算
- Mahotas - 填充影像孔洞
- Mahotas - 條件膨脹影像
- Mahotas - 條件腐蝕影像
- Mahotas - 影像條件分水嶺
- Mahotas - 影像中的區域性最小值
- Mahotas - 影像的區域最大值
- Mahotas - 影像的區域最小值
- Mahotas - 高階概念
- Mahotas - 影像閾值化
- Mahotas - 設定閾值
- Mahotas - 軟閾值
- Mahotas - Bernsen 區域性閾值化
- Mahotas - 小波變換
- 製作影像小波中心
- Mahotas - 距離變換
- Mahotas - 多邊形實用程式
- Mahotas - 區域性二值模式
- 閾值鄰接統計
- Mahotas - Haralic 特徵
- 標記區域的權重
- Mahotas - Zernike 特徵
- Mahotas - Zernike 矩
- Mahotas - 排序濾波器
- Mahotas - 2D 拉普拉斯濾波器
- Mahotas - 多數濾波器
- Mahotas - 均值濾波器
- Mahotas - 中值濾波器
- Mahotas - Otsu 方法
- Mahotas - 高斯濾波
- Mahotas - 擊中或錯過變換
- Mahotas - 標記最大陣列
- Mahotas - 影像的平均值
- Mahotas - SURF 密集點
- Mahotas - SURF 積分
- Mahotas - Haar 變換
- 突出顯示影像最大值
- 計算線性二值模式
- 獲取標籤的邊界
- 反轉 Haar 變換
- Riddler-Calvard 方法
- 標記區域的大小
- Mahotas - 模板匹配
- 加速魯棒特徵
- 去除帶邊框的標記
- Mahotas - Daubechies 小波
- Mahotas - Sobel 邊緣檢測
Mahotas - 均值濾波器
均值濾波器用於平滑影像以減少噪聲。它的工作原理是計算指定鄰域內所有畫素的平均值,然後用平均值替換原始畫素的值。
假設我們有一個具有不同強度值的灰度影像。因此,某些畫素可能具有比其他畫素更高的強度值。
因此,均值濾波器用於透過稍微模糊影像來建立畫素的均勻外觀。
Mahotas 中的均值濾波器
要在 mahotas 中應用均值濾波器,我們可以使用 **mean_filter()** 函式。
Mahotas 中的均值濾波器使用結構元素來檢查鄰域中的畫素。
結構元素將每個畫素值替換為其相鄰畫素的平均值。
結構元素的大小決定了平滑的程度。更大的鄰域會導致更強的平滑效果,同時會減少一些更精細的細節,而較小的鄰域會導致平滑效果較弱,但會保留更多細節。
mahotas.mean_filter() 函式
mean_filter() 函式使用指定的鄰域大小將均值濾波器應用於輸入影像。
它用其鄰居中的多數值替換每個畫素值。濾波後的影像儲存在輸出陣列中。
語法
以下是 mahotas 中 mean filter() 函式的基本語法:
mahotas.mean_filter(f, Bc, mode='ignore', cval=0.0, out=None)
其中,
**img** - 輸入影像。
**Bc** - 定義鄰域的結構元素。
**mode(可選)** - 指定函式如何處理影像的邊界。它可以取不同的值,例如“reflect”、“constant”、“nearest”、“mirror”或“wrap”。
預設情況下,它設定為“ignore”,這意味著濾波器會忽略影像邊界之外的畫素。
**cval(可選)** - 當 mode='constant' 時要使用的值。預設值為 0.0。
**out(可選)** - 指定將儲存濾波後圖像的輸出陣列。它必須與輸入影像具有相同的形狀。
示例
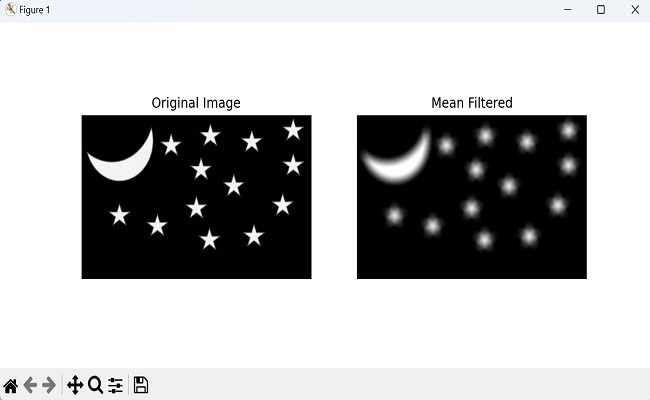
以下是使用 mean_filter() 函式濾波影像的基本示例:
import mahotas as mh
import numpy as np
import matplotlib.pyplot as mtplt
image=mh.imread('tree.tiff', as_grey = True)
structuring_element = mh.disk(12)
filtered_image = mh.mean_filter(image, structuring_element)
# Displaying the original image
fig, axes = mtplt.subplots(1, 2, figsize=(9, 4))
axes[0].imshow(image, cmap='gray')
axes[0].set_title('Original Image')
axes[0].axis('off')
# Displaying the mean filtered image
axes[1].imshow(filtered_image, cmap='gray')
axes[1].set_title('Mean Filtered')
axes[1].axis('off')
mtplt.show()
輸出
執行上述程式碼後,我們將得到以下輸出:
使用反射模式的均值濾波器
當我們將均值濾波器應用於影像時,我們需要考慮每個畫素周圍的相鄰畫素來計算平均值。但是,在影像的邊緣,有一些畫素在一側或多側沒有鄰居。
為了解決這個問題,我們使用 **'reflect'** 模式。反射模式沿著影像邊緣建立映象效果。它允許我們透過映象方式複製其畫素來虛擬地擴充套件影像。
這樣,我們即使在邊緣也可以為均值濾波器提供相鄰畫素。
透過反射影像值,均值濾波器現在可以將這些映象畫素視為真實的鄰居。
它使用這些虛擬鄰居計算平均值,從而在影像邊緣產生更準確的平滑過程。
示例
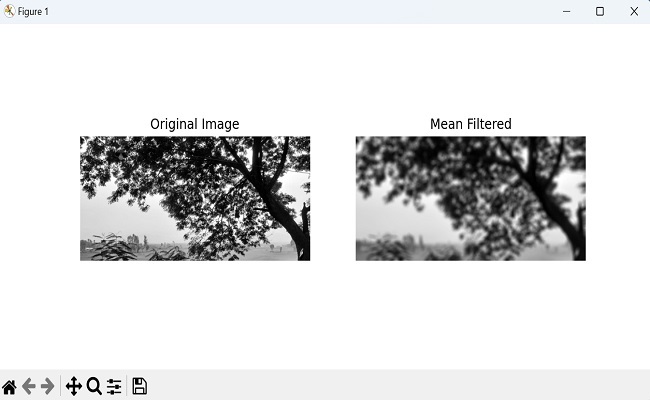
在這裡,我們嘗試使用反射模式計算均值濾波器:
import mahotas as mh
import numpy as np
import matplotlib.pyplot as mtplt
image=mh.imread('nature.jpeg', as_grey = True)
structuring_element = mh.morph.dilate(mh.disk(12), Bc=mh.disk(12))
filtered_image = mh.mean_filter(image, structuring_element, mode='reflect')
# Displaying the original image
fig, axes = mtplt.subplots(1, 2, figsize=(9, 4))
axes[0].imshow(image, cmap='gray')
axes[0].set_title('Original Image')
axes[0].axis('off')
# Displaying the mean filtered image
axes[1].imshow(filtered_image, cmap='gray')
axes[1].set_title('Mean Filtered')
axes[1].axis('off')
mtplt.show()
輸出
上述程式碼的輸出如下:
透過將結果儲存在輸出陣列中
我們也可以使用 Mahotas 將均值濾波器的結果儲存在輸出陣列中。為此,我們首先需要使用 NumPy 庫建立一個空陣列。
此陣列初始化為與輸入影像相同的形狀,以儲存生成的濾波影像。陣列的資料型別指定為 float(預設值)。
最後,我們透過將其作為引數傳遞給 mean_filter() 函式,將生成的濾波影像儲存在輸出陣列中。
示例
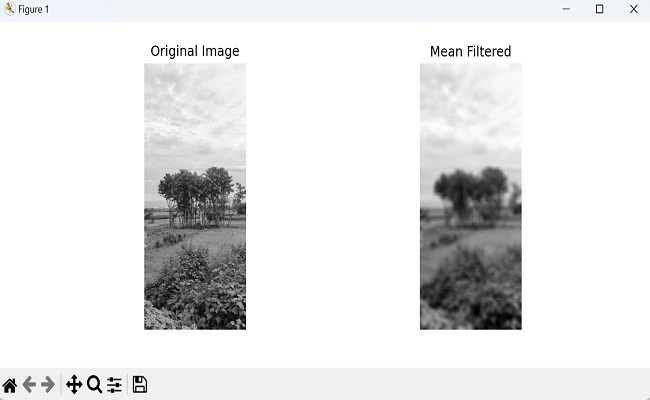
現在,我們嘗試將均值濾波器應用於灰度影像並將結果儲存在特定的輸出陣列中:
import mahotas as mh
import numpy as np
import matplotlib.pyplot as mtplt
image=mh.imread('pic.jpg', as_grey = True)
# Create an output array for the filtered image
output = np.empty(image.shape)
# store the result in the output array
mh.mean_filter(image, Bc=mh.disk(12), out=output)
# Displaying the original image
fig, axes = mtplt.subplots(1, 2, figsize=(9, 4))
axes[0].imshow(image, cmap='gray')
axes[0].set_title('Original Image')
axes[0].axis('off')
# Displaying the mean filtered image
axes[1].imshow(output, cmap='gray')
axes[1].set_title('Mean Filtered')
axes[1].axis('off')
mtplt.show()
輸出
以下是上述程式碼的輸出: