
- 控制系統教程
- 控制系統 - 首頁
- 控制系統 - 緒論
- 控制系統 - 反饋
- 數學模型
- 機械系統的建模
- 機械系統的電氣等效
- 控制系統 - 方框圖
- 方框圖代數
- 方框圖簡化
- 訊號流圖
- 梅森增益公式
- 時間響應分析
- 一階系統的響應
- 二階系統的響應
- 時域指標
- 穩態誤差
- 控制系統 - 穩定性
- 控制系統 - 穩定性分析
- 控制系統 - 根軌跡
- 根軌跡的繪製
- 頻率響應分析
- 控制系統 - 波德圖
- 波德圖的繪製
- 控制系統 - 極座標圖
- 控制系統 - 奈奎斯特圖
- 控制系統 - 補償器
- 控制系統 - 控制器
- 控制系統 - 狀態空間模型
- 狀態空間分析
- 控制系統有用資源
- 控制系統 - 快速指南
- 控制系統 - 有用資源
- 控制系統 - 討論
控制系統 - 補償器
補償器有三種類型:滯後補償器、超前補償器和滯後-超前補償器。這些是最常用的。
滯後補償器
滯後補償器是一種電網路,當施加正弦輸入時,它會產生具有相位滯後的正弦輸出。以下圖顯示了“s”域中的滯後補償器電路。
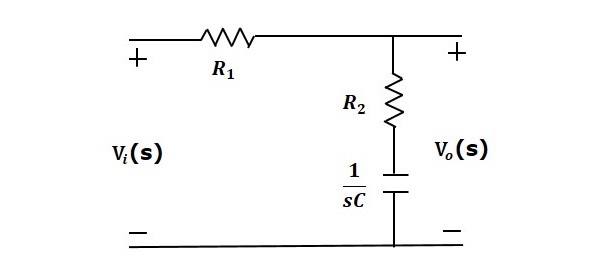
此處,電容與電阻R₂串聯,輸出電壓在此組合上測量。
該滯後補償器的傳遞函式為:
$$\frac{V_o(s)}{V_i(s)}=\frac{1}{\alpha} \left( \frac{s+\frac{1}{\tau}}{s+\frac{1}{\alpha\tau}} \right )$$
其中:
$$\tau=R_2C$$
$$\alpha=\frac{R_1+R_2}{R_2}$$
從上式可知,α總是大於1。
從傳遞函式可以看出,滯後補償器在s = − 1/(ατ)處有一個極點,在s = −1/τ處有一個零點。這意味著在滯後補償器的零極點配置中,極點更靠近原點。
將s = jω代入傳遞函式。
$$\frac{V_o(j\omega)}{V_i(j\omega)}=\frac{1}{\alpha}\left( \frac{j\omega+\frac{1}{\tau}}{j\omega+\frac{1}{\alpha\tau}}\right )$$
相角 φ = arctan(ωτ) − arctan(αωτ)
我們知道,輸出正弦訊號的相位等於輸入正弦訊號和傳遞函式的相位之和。
因此,為了在這個補償器的輸出端產生相位滯後,傳遞函式的相角應該為負。當α > 1時,就會發生這種情況。
超前補償器
超前補償器是一種電網路,當施加正弦輸入時,它會產生具有相位超前的正弦輸出。以下圖顯示了“s”域中的超前補償器電路。

此處,電容與電阻R₁並聯,輸出電壓在電阻R₂上測量。
該超前補償器的傳遞函式為:
$$\frac{V_o(s)}{V_i(s)}=\beta \left( \frac{s\tau+1}{\beta s\tau+1} \right )$$
其中:
$$\tau=R_1C$$
$$\beta=\frac{R_2}{R_1+R_2}$$
從傳遞函式可以看出,超前補償器在s = −1/β處有一個極點,在s = −1/(βτ)處有一個零點。
將s = jω代入傳遞函式。
$$\frac{V_o(j\omega)}{V_i(j\omega)}=\beta \left( \frac{j\omega\tau+1}{\beta j \omega\tau+1} \right )$$
相角 φ = arctan(ωτ) − arctan(βωτ)
我們知道,輸出正弦訊號的相位等於輸入正弦訊號和傳遞函式的相位之和。
因此,為了在這個補償器的輸出端產生相位超前,傳遞函式的相角應該為正。當0 < β < 1時,就會發生這種情況。因此,在超前補償器的零極點配置中,零點更靠近原點。
滯後-超前補償器
滯後-超前補償器是一種電網路,在一個頻率區域產生相位滯後,在另一個頻率區域產生相位超前。它是滯後補償器和超前補償器的組合。以下圖顯示了“s”域中的滯後-超前補償器電路。
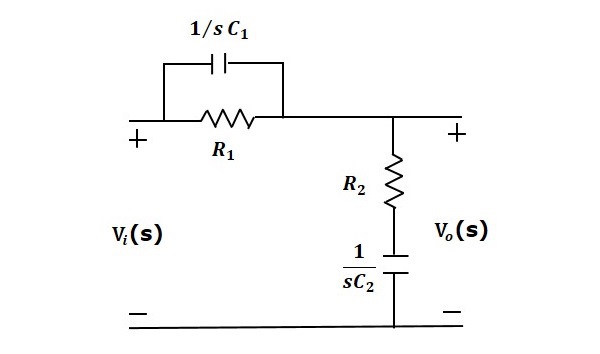
該電路看起來像是兩個補償器級聯連線。因此,該電路的傳遞函式將是超前補償器和滯後補償器傳遞函式的乘積。
$$\frac{V_o(s)}{V_i(s)}=\beta \left( \frac{s\tau_1+1}{\beta s \tau_1+1} \right )\frac{1}{\alpha} \left ( \frac{s+\frac{1}{\tau_2}}{s+\frac{1}{\alpha\tau_2}} \right )$$
我們知道αβ=1。
$$\Rightarrow \frac{V_o(s)}{V_i(s)}=\left ( \frac{s+\frac{1}{\tau_1}}{s+\frac{1}{\beta\tau_1}} \right )\left ( \frac{s+\frac{1}{\tau_2}}{s+\frac{1}{\alpha\tau_2}} \right )$$
其中:
$$\tau_1=R_1C_1$$
$$\tau_2=R_2C_2$$