
- 控制系統教程
- 控制系統 - 首頁
- 控制系統 - 簡介
- 控制系統 - 反饋
- 數學模型
- 機械系統的建模
- 機械系統的電氣等效
- 控制系統 - 方框圖
- 方框圖代數
- 方框圖簡化
- 訊號流圖
- 梅森增益公式
- 時間響應分析
- 一階系統的響應
- 二階系統的響應
- 時域指標
- 穩態誤差
- 控制系統 - 穩定性
- 控制系統 - 穩定性分析
- 控制系統 - 根軌跡
- 根軌跡的繪製
- 頻率響應分析
- 控制系統 - 伯德圖
- 伯德圖的繪製
- 控制系統 - 極座標圖
- 控制系統 - 奈奎斯特圖
- 控制系統 - 補償器
- 控制系統 - 控制器
- 控制系統 - 狀態空間模型
- 狀態空間分析
- 控制系統有用資源
- 控制系統 - 快速指南
- 控制系統 - 有用資源
- 控制系統 - 討論
控制系統 - 伯德圖
伯德圖或伯德圖由兩張圖組成:
- 幅值圖
- 相點陣圖
在這兩張圖中,x軸表示角頻率(對數刻度)。而y軸在幅值圖中表示開環傳遞函式的幅值(線性刻度),在相點陣圖中表示開環傳遞函式的相位角(線性刻度)。
開環傳遞函式的**幅值**(以dB為單位)為:
$$M=20\: \log|G(j\omega)H(j\omega)|$$
開環傳遞函式的**相位角**(以度為單位)為:
$$\phi=\angle G(j\omega)H(j\omega)$$
**注意** - 對數的底數為10。
伯德圖基礎
下表顯示了開環傳遞函式中各項的斜率、幅值和相位角值。繪製伯德圖時,這些資料非常有用。
| 項的型別 | G(jω)H(jω) | 斜率(dB/dec) | 幅值 (dB) | 相位角(度) |
|---|---|---|---|---|
常數 |
$K$ |
$0$ |
$20 \log K$ |
$0$ |
零點在原點 |
$j\omega$ |
$20$ |
$20 \log \omega$ |
$90$ |
‘n’個零點在原點 |
$(j\omega)^n$ |
$20\: n$ |
$20\: n \log \omega$ |
$90\: n$ |
極點在原點 |
$\frac{1}{j\omega}$ |
$-20$ |
$-20 \log \omega$ |
$-90 \: 或 \: 270$ |
‘n’個極點在原點 |
$\frac{1}{(j\omega)^n}$ |
$-20\: n$ |
$-20 \: n \log \omega$ |
$-90 \: n \: 或 \: 270 \: n$ |
簡單零點 |
$1+j\omega r$ |
$20$ |
$0\: 當\: \omega < \frac{1}{r}$ $20\: \log \omega r\: 當 \: \omega > \frac{1}{r}$ |
$0 \: 當 \: \omega < \frac{1}{r}$ $90 \: 當 \: \omega > \frac{1}{r}$ |
簡單極點 |
$\frac{1}{1+j\omega r}$ |
$-20$ |
$0\: 當\: \omega < \frac{1}{r}$ $-20\: \log \omega r\: 當\: \omega > \frac{1}{r}$ |
$0 \: 當 \: \omega < \frac{1}{r}$ $-90\: 或 \: 270 \: 當\: \omega > \frac{1}{r}$ |
二階導數項 |
$\omega_n^2\left ( 1-\frac{\omega^2}{\omega_n^2}+\frac{2j\delta\omega}{\omega_n} \right )$ |
$40$ |
$40\: \log\: \omega_n\: 當 \: \omega < \omega_n$ $20\: \log\:(2\delta\omega_n^2)\: 當 \: \omega=\omega_n$ $40 \: \log \: \omega\:當 \:\omega > \omega_n$ |
$0 \: 當 \: \omega < \omega_n$ $90 \: 當 \: \omega = \omega_n$ $180 \: 當 \: \omega > \omega_n$ |
二階積分項 |
$\frac{1}{\omega_n^2\left ( 1-\frac{\omega^2}{\omega_n^2}+\frac{2j\delta\omega}{\omega_n} \right )}$ |
$-40$ |
$-40\: \log\: \omega_n\: 當 \: \omega < \omega_n$ $-20\: \log\:(2\delta\omega_n^2)\: 當 \: \omega=\omega_n$ $-40 \: \log \: \omega\:當 \:\omega > \omega_n$ |
$-0 \: 當 \: \omega < \omega_n$ $-90 \: 當 \: \omega = \omega_n$ $-180 \: 當 \: \omega > \omega_n$ |
考慮開環傳遞函式 $G(s)H(s) = K$。
幅值 $M = 20\: \log K$ dB
相位角 $\phi = 0$ 度
如果 $K = 1$,則幅值為 0 dB。
如果 $K > 1$,則幅值將為正。
如果 $K < 1$,則幅值將為負。
下圖顯示了相應的伯德圖。
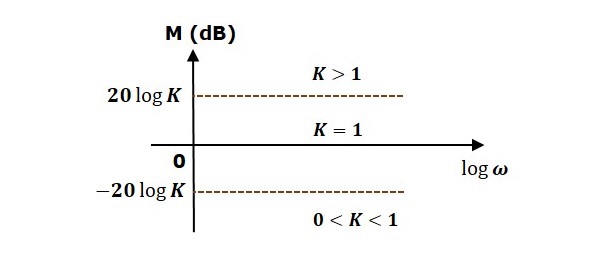

幅值圖是一條水平線,與頻率無關。當 K 值為 1 時,0 dB 線本身就是幅值圖。對於 K 的正值,水平線將向上移動 $20 \:\log K$ dB。對於 K 的負值,水平線將向下移動 $20\: \log K$ dB。對於所有 K 的正值,0 度線本身就是相點陣圖。
考慮開環傳遞函式 $G(s)H(s) = s$。
幅值 $M = 20 \log \omega$ dB
相位角 $\phi = 90^0$
在 $\omega = 0.1$ rad/sec 時,幅值為 -20 dB。
在 $\omega = 1$ rad/sec 時,幅值為 0 dB。
在 $\omega = 10$ rad/sec 時,幅值為 20 dB。
下圖顯示了相應的伯德圖。


幅值圖是一條斜率為 20 dB/dec 的直線。這條線從 $\omega = 0.1$ rad/sec 開始,幅值為 -20 dB,並以相同的斜率繼續。它在 $\omega = 1$ rad/sec 時與 0 dB 線相交。在這種情況下,相點陣圖是 900 線。
考慮開環傳遞函式 $G(s)H(s) = 1 + s\tau$。
幅值 $M = 20\: log \sqrt{1 + \omega^2\tau^2}$ dB
相位角 $\phi = \tan^{-1}\omega\tau$ 度
對於 $ω < \frac{1}{\tau}$ ,幅值為 0 dB,相位角為 0 度。
對於 $\omega > \frac{1}{\tau}$ ,幅值為 $20\: \log \omega\tau$ dB,相位角為 900。
下圖顯示了相應的伯德圖。
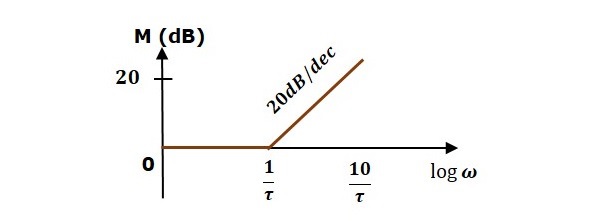

幅值圖在 $\omega=\frac{1}{\tau}$ rad/sec 之前幅值為 0 dB。從 $\omega = \frac{1}{\tau}$ rad/sec 開始,其斜率為 20 dB/dec。在這種情況下,相點陣圖在 $\omega = \frac{1}{\tau}$ rad/sec 之前相位角為 0 度,從這裡開始,相位角為 900。這個伯德圖被稱為**漸近伯德圖**。
由於幅值和相點陣圖是用直線表示的,精確的伯德圖類似於漸近伯德圖。唯一的區別是精確的伯德圖將具有簡單的曲線而不是直線。
同樣,您可以針對表格中給出的開環傳遞函式的其他項繪製伯德圖。