
- 控制系統教程
- 控制系統 - 首頁
- 控制系統 - 簡介
- 控制系統 - 反饋
- 數學模型
- 機械系統的建模
- 機械系統的電氣類比
- 控制系統 - 方塊圖
- 方塊圖代數
- 方塊圖化簡
- 訊號流圖
- 梅森增益公式
- 時間響應分析
- 一階系統的響應
- 二階系統的響應
- 時域指標
- 穩態誤差
- 控制系統 - 穩定性
- 控制系統 - 穩定性分析
- 控制系統 - 根軌跡
- 根軌跡的繪製
- 頻率響應分析
- 控制系統 - 波德圖
- 波德圖的繪製
- 控制系統 - 極座標圖
- 控制系統 - 奈奎斯特圖
- 控制系統 - 補償器
- 控制系統 - 控制器
- 控制系統 - 狀態空間模型
- 狀態空間分析
- 控制系統有用資源
- 控制系統 - 快速指南
- 控制系統 - 有用資源
- 控制系統 - 討論
控制系統 - 方塊圖化簡
前面章節中討論的概念有助於化簡(簡化)方塊圖。
方塊圖化簡規則
遵循以下規則來簡化(化簡)包含許多方塊、加法點和取樣點的方塊圖。
規則 1 - 檢查串聯連線的方塊並進行簡化。
規則 2 - 檢查並聯連線的方塊並進行簡化。
規則 3 - 檢查反饋迴路中的方塊並進行簡化。
規則 4 - 如果在簡化過程中取樣點出現問題,將其向右移動。
規則 5 - 如果在簡化過程中加法點出現問題,將其向左移動。
規則 6 - 重複上述步驟,直到得到簡化形式,即單個方塊。
注意 - 此單個方塊中存在的傳遞函式是整個方塊圖的傳遞函式。
示例
考慮下圖所示的方塊圖。讓我們使用方塊圖化簡規則來簡化(化簡)此方塊圖。

步驟 1 - 對方塊 $G_1$ 和 $G_2$ 使用規則 1。對方塊 $G_3$ 和 $G_4$ 使用規則 2。修改後的方塊圖如下所示。

步驟 2 - 對方塊 $G_1G_2$ 和 $H_1$ 使用規則 3。對方塊 $G_5$ 後面的取樣點使用規則 4 進行移動。修改後的方塊圖如下所示。

步驟 3 - 對方塊 $(G_3 + G_4)$ 和 $G_5$ 使用規則 1。修改後的方塊圖如下所示。

步驟 4 - 對方塊 $(G_3 + G_4)G_5$ 和 $H_3$ 使用規則 3。修改後的方塊圖如下所示。

步驟 5 - 對串聯連線的方塊使用規則 1。修改後的方塊圖如下所示。

步驟 6 - 對反饋迴路中的方塊使用規則 3。修改後的方塊圖如下所示。這是簡化的方塊圖。
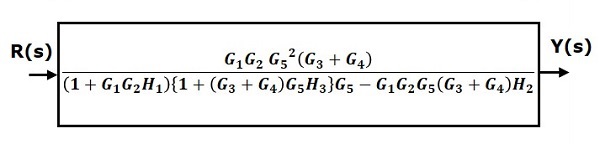
因此,系統的傳遞函式為
$$\frac{Y(s)}{R(s)}=\frac{G_1G_2G_5^2(G_3+G_4)}{(1+G_1G_2H_1)\lbrace 1+(G_3+G_4)G_5H_3\rbrace G_5-G_1G_2G_5(G_3+G_4)H_2}$$
注意 - 為了計算具有多個輸入的方塊圖的傳遞函式,請按順序執行以下步驟。
步驟 1 - 透過一次考慮一個輸入並使其餘輸入為零來找到方塊圖的傳遞函式。
步驟 2 - 對其餘輸入重複步驟 1。
步驟 3 - 透過將所有這些傳遞函式相加來獲得總的傳遞函式。
對於複雜的系統,方塊圖化簡過程需要更多時間。因為,我們必須在每個步驟之後繪製(部分簡化)的方塊圖。因此,為了克服這個缺點,可以使用訊號流圖(表示)。
在接下來的兩章中,我們將討論與訊號流圖相關的概念,即如何從給定的方塊圖中表示訊號流圖,以及僅使用增益公式而不進行任何化簡過程即可計算傳遞函式。