- 數字影像處理
- DIP - 首頁
- DIP - 影像處理簡介
- DIP - 訊號與系統簡介
- DIP - 攝影史
- DIP - 應用與用途
- DIP - 維度概念
- DIP - 相機成像
- DIP - 相機機制
- DIP - 畫素概念
- DIP - 透視變換
- DIP - 每畫素位元數概念
- DIP - 影像型別
- DIP - 顏色程式碼轉換
- DIP - 灰度到RGB轉換
- DIP - 取樣概念
- DIP - 畫素解析度
- DIP - 放大概念
- DIP - 放大方法
- DIP - 空間解析度
- DIP - 每英寸畫素、點和線
- DIP - 灰度解析度
- DIP - 量化概念
- DIP - ISO 標準曲線
- DIP - 抖動概念
- DIP - 直方圖簡介
- DIP - 亮度和對比度
- DIP - 影像變換
- DIP - 直方圖滑動
- DIP - 直方圖拉伸
- DIP - 機率論簡介
- DIP - 直方圖均衡化
- DIP - 灰度變換
- DIP - 卷積概念
- DIP - 掩膜概念
- DIP - 模糊概念
- DIP - 邊緣檢測概念
- DIP - Prewitt運算元
- DIP - Sobel運算元
- DIP - Robinson羅盤掩膜
- DIP - Krisch羅盤掩膜
- DIP - 拉普拉斯運算元
- DIP - 頻域分析
- DIP - 傅立葉級數和變換
- DIP - 卷積定理
- DIP - 高通濾波器與低通濾波器
- DIP - 顏色空間簡介
- DIP - JPEG壓縮
- DIP - 光學字元識別
- DIP - 計算機視覺與圖形學
- DIP 有用資源
- DIP - 快速指南
- DIP - 有用資源
- DIP - 討論
透視變換
當人眼看近處物體時,相比遠處物體看起來更大。這通常被稱為透視。而變換是指物體等從一種狀態轉換到另一種狀態。
總的來說,透視變換處理的是將三維世界轉換為二維影像的過程。這與人眼的視覺原理相同,也與相機的工作原理相同。
我們將詳細探討為什麼近處的物體看起來更大,而遠處的物體看起來更小,即使當你靠近它們時,它們看起來會更大。
我們將從參考系的概念開始討論。
參考系
參考系基本上是一組參考值,我們根據這些值來測量某事物。
五個參考系
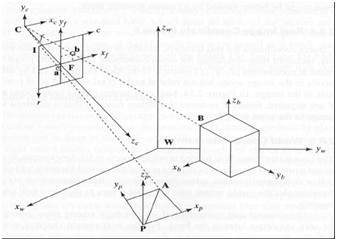
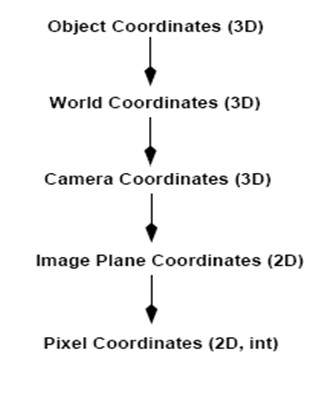
為了分析三維世界/影像/場景,需要五個不同的參考系。
- 物體
- 世界
- 相機
- 影像
- 畫素
1. 物體座標系
物體座標系用於對物體建模。例如,檢查特定物體相對於其他物體是否處於正確位置。它是一個三維座標系。
2. 世界座標系
世界座標系用於關聯三維世界中的物體。它是一個三維座標系。
3. 相機座標系
相機座標系用於關聯相對於相機的物體。它是一個三維座標系。
4. 影像座標系
它不是三維座標系,而是一個二維繫統。它用於描述如何將三維點對映到二維影像平面。
5. 畫素座標系
它也是一個二維座標系。每個畫素都有一個畫素座標值。
這五個參考系之間的變換
這就是三維場景如何轉換為具有畫素影像的二維影像。
現在我們將用數學方法解釋這個概念。
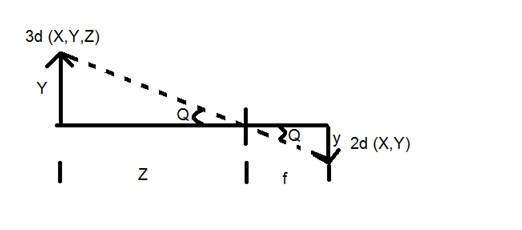
其中
Y = 三維物體
y = 二維影像
f = 相機的焦距
Z = 物體與相機之間的距離
現在,在這個變換中形成了兩個不同的角度,用Q表示。
第一個角度是
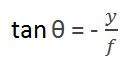
其中負號表示影像倒置。形成的第二個角度是
比較這兩個方程,我們得到
從這個方程可以看出,當光線從物體反射後經過相機時,會形成一個倒立的影像。
我們可以透過這個例子更好地理解這一點。
例如
計算所成影像的大小
假設拍攝了一個身高5米的人的影像,此人距離相機50米,我們必須說明,如果相機的焦距為50毫米,則該人的影像大小是多少。
解答
由於焦距以毫米為單位,因此為了計算,我們必須將所有內容都轉換為毫米。
所以,
Y = 5000 毫米。
f = 50 毫米。
Z = 50000 毫米。
將這些值代入公式,我們得到

= -5 毫米。
再次,負號表示影像倒置。