- 電機教程
- 電機 - 首頁
- 基本概念
- 機電能量轉換
- 儲存在磁場中的能量
- 單激和雙激系統
- 旋轉電機
- 法拉第電磁感應定律
- 感應電動勢的概念
- 弗萊明左手定則和右手定則
- 變壓器
- 電力變壓器
- 變壓器的構造
- 變壓器的電動勢方程
- 匝數比和電壓變換比
- 理想變壓器和實際變壓器
- 直流變壓器
- 變壓器的損耗
- 變壓器的效率
- 三相變壓器
- 變壓器的型別
- 直流電機
- 直流電機的構造
- 直流電機的型別
- 直流發電機的原理
- 直流發電機的電動勢方程
- 直流發電機的型別
- 直流電機的原理
- 直流電機中的反電動勢
- 直流電機的型別
- 直流電機的損耗
- 直流電機的應用
- 感應電機
- 感應電機的介紹
- 單相感應電機
- 三相感應電機
- 三相感應電機的構造
- 三相感應電機負載執行
- 三相感應電動機的特性
- 調速和速度控制
- 三相感應電機啟動方法
- 同步電機
- 三相同步電機的介紹
- 同步電機的構造
- 三相交流發電機的執行
- 同步電機中的電樞反應
- 三相交流發電機的輸出功率
- 三相交流發電機的損耗和效率
- 三相同步電機的執行
- 同步電機的等效電路和功率因數
- 同步電機產生的功率
- 電機資源
- 電機 - 快速指南
- 電機 - 資源
- 電機 - 討論
三相感應電動機的特性
三相感應電機的執行效能可以用以下兩個特性來解釋:
轉矩-滑差特性
轉矩-速度特性
三相感應電機的轉矩-滑差特性
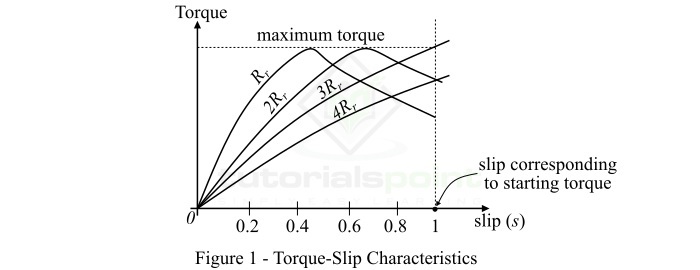
三相感應電機的**轉矩-滑差特性**是電機轉矩和滑差在特定轉子電阻值下繪製的曲線。圖1顯示了典型三相感應電機在滑差範圍為s = 0到s = 1的不同轉子電阻值下的不同轉矩-滑差特性。
對於三相感應電機,執行條件下電機轉矩和滑差之間的關係由下式給出:
$$ \mathrm{\mathit{\tau _{r}}\:=\:\frac{\mathit{KsR_{r}}}{\mathit{R_{r}^{\mathrm{2}}+s^{\mathrm{2}}X_{r}^{\mathrm{2}}}}\:\cdot \cdot \cdot (1)} $$
其中,**K** 是常數,s 是滑差,$\mathit{R_{r}}$ 是每相轉子電阻,$\mathit{X_{r}}$ 是每相靜止轉子電抗。
從公式1,我們可以得出以下幾點:
情況1
如果s = 0,則$\mathit{\tau _{r}}\:=\:0$。因此,轉矩-滑差曲線從原點開始。
情況2
在電機的正常速度下,滑差很小,因此$\mathit{sX_{r}}$與$\mathit{R_{r}}$相比可以忽略不計。
$$ \mathrm{\therefore \mathit{\tau _{r}}\propto \mathit{\frac{s}{R_{r}}}} $$
由於對於給定的電機,$\mathit{R_{r}}$也是常數。
$$ \mathrm{\therefore \mathit{\tau _{r}}\propto \mathit{s}} $$
因此,轉矩-滑差曲線是從零滑差到對應於滿載滑差的直線。
情況3
如果滑差值超過滿載滑差,則轉矩增加,當$\mathit{R _{r}}\:=\:\mathit{s\:X_{r}}$時達到最大值。三相感應電機中的這個最大轉矩稱為**擊穿轉矩**或**拉出轉矩**。當感應電機在額定電壓和頻率下執行時,擊穿轉矩的值至少是滿載轉矩的兩倍。
情況4
當滑差值大於對應於最大轉矩的滑差值時,$\mathit{s^{\mathrm{2}}\:X_{r}^{\mathrm{2}}}$項迅速增加,因此$\mathit{R_{r}^{\mathrm{2}}}$可以忽略不計。
$$ \mathrm{\therefore \mathit{\tau _{r}}\propto \mathit{\frac{s}{s^{\mathrm{2}}X_{r}^{\mathrm{2}}}}} $$
由於$\mathit{X_{r}^{\mathrm{2}}}$實際上是常數,則
$$ \mathrm{\mathit{\tau _{r}}\propto \mathit{\frac{\mathrm{1}}{s}}} $$
因此,轉矩現在與滑差成反比。因此,轉矩-滑差曲線是矩形雙曲線。
因此,從以上對三相感應電機轉矩-滑差特性的分析可以看出,向轉子電路增加電阻不會改變最大轉矩的值,而只會改變發生最大轉矩的滑差值。
三相感應電機的轉矩-速度特性
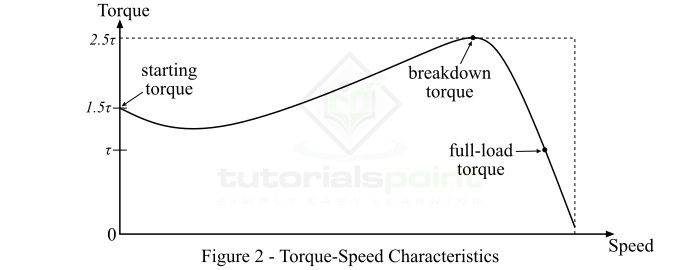
對於三相感應電機,電機轉矩取決於速度,但我們不能用簡單的數學方程來表達它們之間的關係。因此,我們使用轉矩-速度特性曲線來顯示這種關係。圖2顯示了三相感應電機的典型轉矩-速度特性曲線。
從該特性曲線可以看出以下幾點:
如果滿載轉矩為$\tau$,則啟動轉矩為$1.5\tau$,最大轉矩(或擊穿轉矩)為$2.5\tau$
在滿載情況下,如果電機的速度為N,如果軸上的機械負載增加,電機的速度將下降,直到電機轉矩再次等於負載轉矩。一旦兩個轉矩相等,電機將以恆定速度執行,但低於之前的速度。然而,如果電機轉矩大於$2.5\tau$(即擊穿轉矩),電機將突然停止。
對於三相感應電機,轉矩-速度曲線在空載和滿載點之間基本上是一條直線。曲線線的斜率取決於轉子電路的電阻,即電阻越大,斜率越陡。