玻爾茲曼機
這些是具有遞迴結構的隨機學習過程,是ANN早期最佳化技術的基礎。玻爾茲曼機由Geoffrey Hinton和Terry Sejnowski於1985年發明。Hinton對玻爾茲曼機的論述可以提供更清晰的理解。
“這個網路的一個令人驚訝的特點是它只使用區域性可用的資訊。權重的變化只取決於它連線的兩個單元的行為,即使這種變化最佳化的是一個全域性度量” - Ackley, Hinton 1985。
關於玻爾茲曼機的一些重要點:
它們使用遞迴結構。
它們由隨機神經元組成,這些神經元具有兩種可能的狀態之一,即1或0。
其中一些神經元是自適應的(自由狀態),而另一些則被鉗制(凍結狀態)。
如果我們對離散Hopfield網路應用模擬退火,它就會變成玻爾茲曼機。
玻爾茲曼機的目標
玻爾茲曼機的主要目的是最佳化問題的解決方案。玻爾茲曼機的工作是最佳化與特定問題相關的權重和數量。
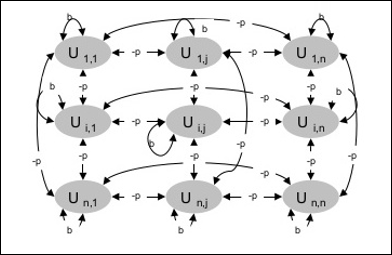
架構
下圖顯示了玻爾茲曼機的架構。從圖中可以清楚地看出,它是一個二維單元陣列。這裡,單元之間互連上的權重為–p,其中p > 0。自連線的權重由b給出,其中b > 0。
訓練演算法
眾所周知,玻爾茲曼機具有固定的權重,因此不需要訓練演算法,因為我們不需要更新網路中的權重。但是,要測試網路,我們必須設定權重以及找到共識函式 (CF)。
玻爾茲曼機有一組單元Ui和Uj,並且在它們之間具有雙向連線。
我們考慮固定權重,例如wij。
如果Ui和Uj連線,則wij ≠ 0。
加權互連中也存在對稱性,即wij = wji。
wii也存在,即單元之間存在自連線。
對於任何單元Ui,其狀態ui為1或0。
玻爾茲曼機的主要目標是最大化共識函式 (CF),其關係如下所示
$$CF\:=\:\displaystyle\sum\limits_{i} \displaystyle\sum\limits_{j\leqslant i} w_{ij}u_{i}u_{j}$$
現在,當狀態從1變為0或從0變為1時,共識的變化可以透過以下關係給出:
$$\Delta CF\:=\:(1\:-\:2u_{i})(w_{ij}\:+\:\displaystyle\sum\limits_{j\neq i} u_{i} w_{ij})$$
這裡ui是Ui的當前狀態。
係數 (1 - 2ui) 的變化由以下關係給出:
$$(1\:-\:2u_{i})\:=\:\begin{cases}+1, & U_{i}\:當前處於關閉狀態\\-1, & U_{i}\:當前處於開啟狀態\end{cases}$$
通常,單元Ui不會改變其狀態,但如果改變,則資訊將駐留在單元的本地。隨著這種變化,網路的共識也會增加。
網路接受單元狀態變化的機率由以下關係給出:
$$AF(i,T)\:=\:\frac{1}{1\:+\:exp[-\frac{\Delta CF(i)}{T}]}$$
這裡,T是控制引數。當CF達到最大值時,它會減小。
測試演算法
步驟1 - 初始化以下內容以開始訓練:
- 表示問題約束的權重
- 控制引數T
步驟2 - 當停止條件不為真時,繼續步驟3-8。
步驟3 - 執行步驟4-7。
步驟4 - 假設其中一個狀態改變了權重,並將整數I, J選擇為1和n之間的隨機值。
步驟5 - 計算共識變化如下:
$$\Delta CF\:=\:(1\:-\:2u_{i})(w_{ij}\:+\:\displaystyle\sum\limits_{j\neq i} u_{i} w_{ij})$$
步驟6 - 計算網路接受狀態變化的機率
$$AF(i,T)\:=\:\frac{1}{1\:+\:exp[-\frac{\Delta CF(i)}{T}]}$$
步驟7 - 接受或拒絕此更改,如下所示:
情況一 - 如果R < AF,則接受更改。
情況二 - 如果R ≥ AF,則拒絕更改。
這裡,R是0到1之間的隨機數。
步驟8 - 按如下方式減少控制引數(溫度):
T(new) = 0.95T(old)
步驟9 - 測試停止條件,例如:
- 溫度達到指定值
- 在指定的迭代次數內沒有狀態變化