雷達系統 - 跟蹤雷達
用於跟蹤一個或多個目標軌跡的雷達稱為跟蹤雷達。一般來說,它在開始跟蹤活動之前會執行以下功能。
- 目標檢測
- 目標距離
- 查詢仰角和方位角
- 查詢多普勒頻移
因此,跟蹤雷達透過跟蹤三個引數之一來跟蹤目標——距離、角度、多普勒頻移。大多數跟蹤雷達使用角度跟蹤原理。現在,讓我們討論一下什麼是角度跟蹤。
角度跟蹤
雷達天線的窄波束執行角度跟蹤。雷達天線的軸線被視為參考方向。如果目標方向與參考方向不相同,則會出現角度誤差,它只不過是兩個方向之間的差異。
如果將角度誤差訊號應用於伺服控制系統,則它將使雷達天線的軸線朝向目標方向移動。當角度誤差為零時,雷達天線的軸線和目標方向將重合。跟蹤雷達中存在一個反饋機制,它會一直工作,直到角度誤差變為零。
以下是角度跟蹤中使用的兩種技術。
- 順序掃描
- 錐形掃描
現在,讓我們逐一討論這兩種技術。
順序掃描
如果天線波束在兩個模式之間交替切換以跟蹤目標,則稱為順序掃描。它也稱為順序切換和瓣切換。此技術用於在一個座標中查詢角度誤差。它提供了角度誤差的大小和方向的詳細資訊。
下圖顯示了極座標系中順序掃描的一個示例。
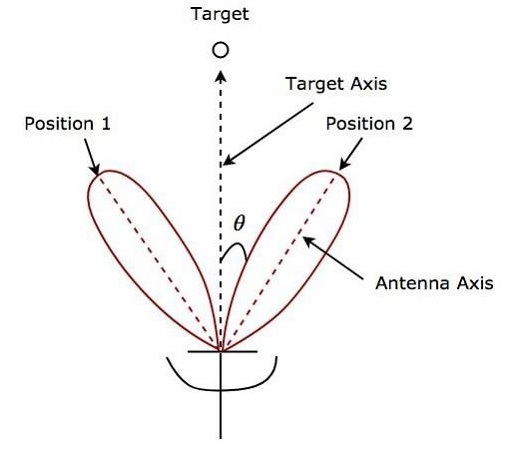
如圖所示,天線波束在位置 1 和位置 2 之間交替切換。上圖中指示了角度誤差 θ。順序掃描以高精度給出目標的位置。這是順序掃描的主要優勢。
錐形掃描
如果天線波束持續旋轉以跟蹤目標,則稱為錐形掃描。錐形掃描調製用於查詢目標的位置。下圖顯示了錐形掃描的一個示例。
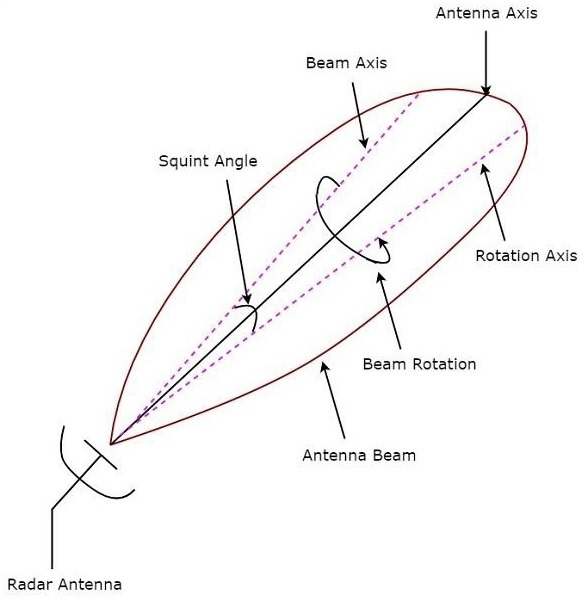
偏角是波束軸線和旋轉軸線之間的角度,如上圖所示。從目標獲得的回波訊號以等於天線波束旋轉頻率的頻率進行調製。
目標方向與旋轉軸線之間的角度決定了調製訊號的幅度。因此,必須從回波訊號中提取錐形掃描調製,然後將其應用於伺服控制系統,該系統將天線波束軸線移動到目標方向。
廣告