衛星通訊 - 快速指南
衛星通訊 - 介紹
一般來說,**衛星**是指在太空中圍繞較大天體旋轉的較小天體。例如,月球是地球的天然衛星。
我們知道,**通訊**是指透過任何媒介或渠道在兩個或多個實體之間交換(共享)資訊。換句話說,它就是傳送、接收和處理資訊。
如果通訊是透過衛星在任意兩個地球站之間進行的,則稱為**衛星通訊**。在這種通訊中,電磁波用作載波訊號。這些訊號承載諸如語音、音訊、影片或任何其他資料在陸地和太空之間以及反向傳輸的資訊。
蘇聯於 1957 年發射了世界上第一顆人造衛星,名為斯普特尼克 1 號。近 18 年後,印度也於 1975 年發射了名為阿利亞巴塔的人造衛星。
衛星通訊的必要性
以下兩種傳播方式之前用於在一定距離內進行通訊。
**地波傳播** - 地波傳播適用於高達 30MHz 的頻率。這種通訊方法利用了地球的對流層條件。
**天波傳播** - 這種通訊型別的適用頻寬大致在 30-40 MHz 之間,它利用了地球的電離層特性。
在地波傳播和天波傳播中,最大跳躍或站點距離僅限於 1500 公里。衛星通訊克服了這一限制。在這種方法中,衛星提供**遠距離通訊**,遠遠超出了視線範圍。
由於衛星位於地球上方一定高度,因此透過衛星可以輕鬆地在任意兩個地球站之間進行通訊。因此,它克服了由於地球曲率導致的兩個地球站之間通訊的限制。
衛星的工作原理
**衛星**是沿特定路徑繞另一天體執行的天體。通訊衛星只不過是太空中的微波中繼站。它有助於電信、無線電和電視以及網際網路應用。
**中繼器**是一種電路,它會增強接收到的訊號的強度,然後將其傳輸。但是,此中繼器充當**轉發器**。這意味著它會將接收到的訊號的頻帶更改為另一個頻帶。
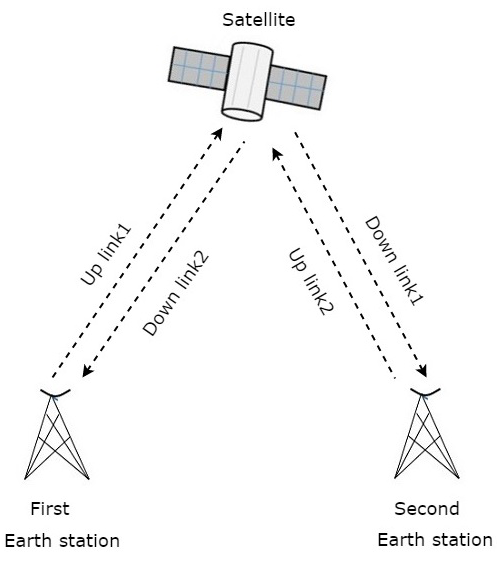
將訊號傳送到太空的頻率稱為**上行鏈路頻率**。類似地,轉發器傳送訊號的頻率稱為**下行鏈路頻率**。下圖清楚地說明了這一概念。
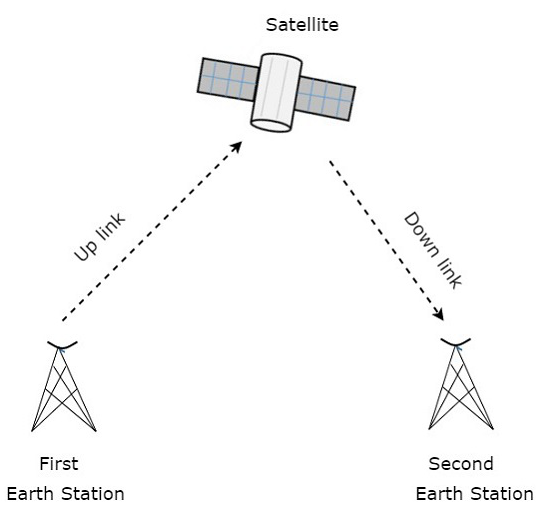
從第一個地球站到衛星透過通道的訊號傳輸稱為**上行鏈路**。類似地,從衛星到第二個地球站透過通道的訊號傳輸稱為**下行鏈路**。
**上行鏈路頻率**是第一個地球站與衛星通訊的頻率。衛星轉發器將此訊號轉換為另一個頻率,並將其傳送到第二個地球站。此頻率稱為**下行鏈路頻率**。同樣,第二個地球站也可以與第一個地球站通訊。
衛星通訊過程始於一個地球站。在這裡,安裝旨在傳送和接收來自繞地球執行軌道上的衛星的訊號。地球站以高功率、高頻(GHz 範圍)訊號的形式將資訊傳送到衛星。
衛星接收並重新傳輸訊號回地球,在那裡它們被衛星覆蓋區域內的其他地球站接收。衛星的**足跡**是接收來自衛星的有用強度訊號的區域。
衛星通訊的優缺點
在本節中,讓我們看一下衛星通訊的優點和缺點。
以下是使用衛星通訊的**優點**
覆蓋面積大於地面系統
可以覆蓋地球的每一個角落
傳輸成本與覆蓋面積無關
更大的頻寬和廣播可能性
以下是使用衛星通訊的**缺點**:
將衛星發射到軌道是一個昂貴的過程。
衛星系統的傳播延遲大於傳統地面系統。
如果衛星系統出現任何問題,難以提供維修活動。
自由空間損耗更大
可能會出現頻率擁塞。
衛星通訊的應用
衛星通訊在我們的日常生活中發揮著至關重要的作用。以下是衛星通訊的應用:
廣播和語音通訊
電視廣播,如直接對家 (DTH)
網際網路應用,如提供用於資料傳輸的網際網路連線、GPS 應用、網際網路衝浪等。
軍事應用和導航
遙感應用
天氣狀況監測和預報
衛星通訊 - 軌道力學
我們知道,衛星繞地球執行的路徑稱為**軌道**。此路徑可以用數學符號表示。軌道力學是對存在於軌道中的衛星運動的研究。因此,透過軌道運動的知識,我們可以很容易地理解空間操作。
軌道要素
軌道要素是有助於描述衛星軌道運動的引數。以下是**軌道要素**。
- 半長軸
- 偏心率
- 平均近點角
- 近地點幅角
- 傾角
- 升交點赤經
以上六個軌道要素定義了地球衛星的軌道。因此,可以根據軌道要素的值輕鬆地區分一顆衛星與其他衛星。
半長軸
**半長軸 (a)** 的長度定義了衛星軌道的尺寸。它是長軸的一半。它從中心穿過焦點到橢圓的邊緣。因此,它是軌道在軌道兩個最遠點處的半徑。
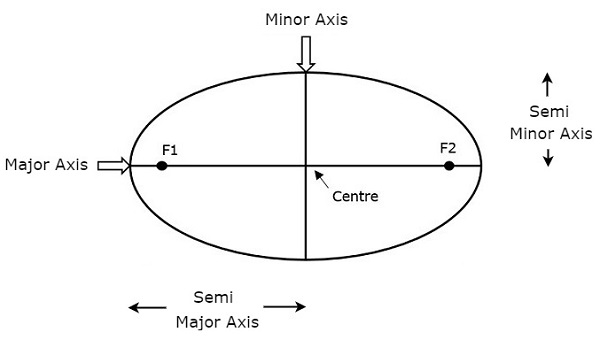
上圖中表示了半長軸和半短軸。**半長軸 (a)** 的長度不僅決定了衛星軌道的尺寸,還決定了旋轉週期。
如果將圓形軌道視為一個特例,則半長軸的長度將等於該圓形軌道的**半徑**。
偏心率
**偏心率 (e)** 的值確定了衛星軌道的形狀。此引數表示軌道形狀與完美圓形的偏差。
如果橢圓軌道的半長軸和半短軸的長度分別為 a 和 b,則**偏心率 (e)** 的數學表示式為
$$e = \frac{\sqrt{a^2 - b^2}}{a}$$
圓形軌道的偏心率值為**零**,因為 a 和 b 相等。而橢圓軌道的偏心率值在零和一之間。
下圖顯示了不同偏心率 (e) 值的各種衛星軌道
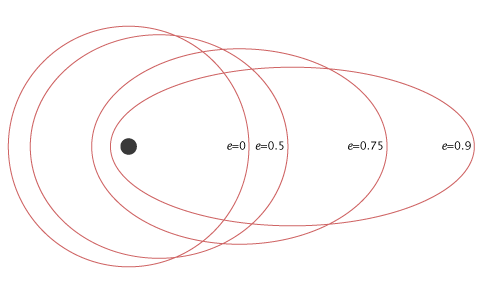
在上圖中,對應於偏心率 (e) 值為零的衛星軌道是圓形軌道。其餘三個衛星軌道是橢圓形的,分別對應於偏心率 (e) 值 0.5、0.75 和 0.9。
平均近點角
對於衛星,最靠近地球的點稱為近地點。**平均近點角 (M)** 給出了相對於近地點的衛星角位置的平均值。
如果軌道是圓形的,則平均近點角給出衛星在軌道中的角位置。但是,如果軌道是橢圓形的,則計算精確位置非常困難。此時,平均近點角用作中間步驟。
近地點幅角
衛星軌道在赤道平面處有兩個交點。第一個點稱為**降交點**,衛星在此處從北半球過渡到南半球。第二個點稱為**升交點**,衛星在此處從南半球過渡到北半球。
**近地點幅角 (ω)** 是升交點和近地點之間的角度。如果近地點和升交點都存在於同一點,則近地點幅角將為零度
近地點幅角在地球中心的軌道平面內以衛星運動的方向測量。
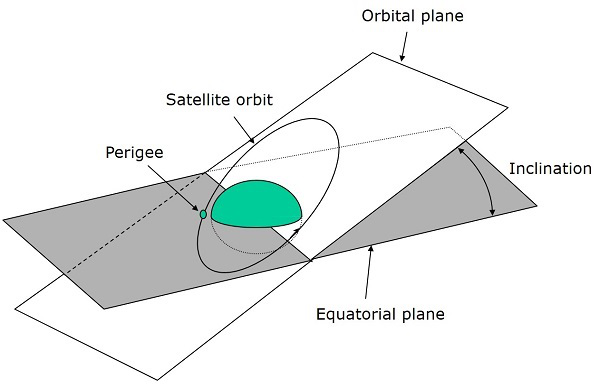
傾角
軌道平面和地球赤道平面之間的角度稱為**傾角 (i)**。它在升交點處測量,方向為東到北。因此,傾角透過將地球赤道作為參考來定義軌道的方向。
根據傾角,軌道有四種類型。
**赤道軌道** - 傾角為零度或 180 度。
**極軌道** - 傾角為 90 度。
**順行軌道** - 傾角在零到 90 度之間。
**逆行軌道** - 傾角在 90 到 180 度之間。
升交點赤經
我們知道,**升交點**是衛星在從南半球到北半球的過程中穿過赤道平面的點。
升交點赤經** (Ω)** 是白羊座線和升交點在赤道平面內向東方向之間的角度。白羊座也稱為春分點。
衛星的**地面軌跡**是地球表面上位於其軌道正下方的路徑。衛星的地面軌跡可以採用多種不同的形式,具體取決於軌道要素的值。
軌道方程
在本節中,讓我們討論與軌道運動相關的方程。
作用在衛星上的力
當衛星繞地球執行時,由於地球的萬有引力,它會受到來自地球的拉力。此力稱為**向心力** (F1),因為此力使衛星傾向於向其移動。
在數學上,由於地球作用在衛星上的**向心力** (F1) 可以寫成
$$F_{1} = \frac{GMm}{R^2} $$
其中,
**G** 是萬有引力常數,等於 6.673 x 10-11 N∙m2/kg2。
**M** 是地球的質量,等於 5.98 x 1024 千克。
**m** 是衛星的質量。
**R** 是衛星到地球中心的距離。
當衛星繞地球執行時,由於太陽和月球的引力,它會受到來自太陽和月球的拉力。這種力被稱為**離心力**(F2),因為這種力會使衛星遠離地球。
在數學上,作用在衛星上的**離心力**(F2)可以寫成
$$F_{2} = \frac{mv^2}{R} $$
其中,**v**是衛星的軌道速度。
軌道速度
衛星的軌道速度是指衛星繞地球執行的速度。當向心力和離心力**平衡**時,衛星不會偏離其軌道,並以一定的速度在該軌道上執行。
因此,**使**向心力(F1)和離心力(F2)相等。
$$\frac{GMm}{R^2} = \frac{mv^2}{R}$$
$$= > \frac{GM}{R} = v^2$$
$$= > v = \sqrt{\frac{GM}{R}}$$
因此,衛星的**軌道速度**為
$$v = \sqrt{\frac{GM}{R}}$$
其中,
G是萬有引力常數,其值為6.673 x 10-11 N∙m2/kg2。
**M** 是地球的質量,等於 5.98 x 1024 千克。
**R** 是衛星到地球中心的距離。
因此,軌道速度主要**取決於**衛星到地球中心距離(R),因為G和M是常數。
衛星通訊 - 開普勒定律
我們知道衛星繞地球執行,這類似於地球繞太陽執行。因此,應用於地球及其繞太陽運動的原理也適用於衛星及其繞地球的運動。
許多科學家從早期就開始提出各種理論。但是,只有**約翰內斯·開普勒**(1571-1630)是最被認可的科學家之一,他描述了衛星繞地球執行的原理。
開普勒提出了三條定律,改變了整個衛星通訊理論和觀測。這些定律被普遍稱為**開普勒定律**。這些定律有助於視覺化太空中的運動。
開普勒第一定律
開普勒第一定律指出,衛星繞其中心天體(地球)執行的路徑將是**橢圓**。該橢圓有兩個焦點F1和F2,如下圖所示。地球的質量中心將始終位於橢圓的兩個焦點之一。
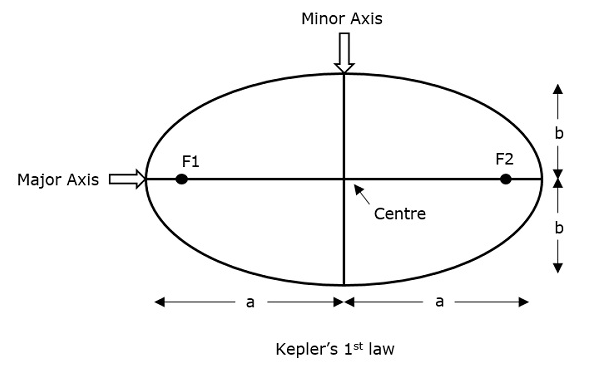
如果考慮從物體中心到其橢圓路徑上一點的距離,則橢圓離中心最遠點稱為**遠地點**,橢圓離中心最近點稱為**近地點**。
該系統的**偏心率“e”**可以寫成−
$$e = \frac{\sqrt{a^2 - b^2}}{a}$$
其中,**a**和**b**分別是橢圓的長半軸和短半軸的長度。
對於**橢圓路徑**,偏心率(e)的值始終介於0和1之間,即$0$ < $e$ < $1$,因為a大於b。假設,如果偏心率(e)的值為零,則路徑將不再是橢圓形,而是會變成圓形。
開普勒第二定律
開普勒第二定律指出,在相等的時間間隔內,衛星相對於地球質量中心的**面積**相同。透過檢視下圖可以理解這一點。

假設,衛星在相同的時間間隔內覆蓋了p1和p2的距離。那麼,衛星在這兩個時刻覆蓋的面積B1和B2相等。
開普勒第三定律
開普勒第三定律指出,橢圓軌道的週期時間的平方與其長半軸長度的立方成正比。**在數學上**,可以寫成如下−
$$T^2\:\alpha\:a^3$$
$$=> T^2=\left(\frac{4\pi ^2}{\mu }\right) a^3$$
其中,$\frac{4\pi^2}{\mu}$是比例常數。
$\mu$是開普勒常數,其值為3.986005 x 1014m3 /sec2
$$1 = \left(\frac{2\pi}{T}\right)^2\left(\frac{a^2}{\mu}\right)$$
$$1 = n^2\left(\frac{a^3}{\mu}\right)$$
$$=> a^3 = \frac{\mu}{n^2}$$
其中,**‘n’**是衛星的平均運動,單位為弧度/秒。
注意 − 當衛星繞地球執行時,它會受到地球的引力,即萬有引力。類似地,它還會受到來自太陽和月球的另一種拉力。因此,衛星必須平衡這兩種力才能保持在軌道上。
地球軌道衛星
衛星在進入太空後應被正確放置在其對應的軌道上。它以特定的方式執行,併為科學、軍事或商業目的服務。分配給相對於地球的衛星的軌道稱為**地球軌道**。這些軌道上的衛星稱為**地球軌道衛星**。
我們應該根據需要正確選擇衛星的軌道。例如,如果衛星放置在**較低軌道**上,則它繞地球執行的時間較短,並且機載攝像機的解析度會更好。類似地,如果衛星放置在**較高軌道**上,則它繞地球執行的時間較長,並且一次覆蓋更多的地球表面。
以下是三種重要的**地球軌道衛星型別**−
- 地球同步軌道衛星
- 中地球軌道衛星
- 低地球軌道衛星
現在,讓我們逐一討論每種型別的地球軌道衛星。
地球同步軌道衛星
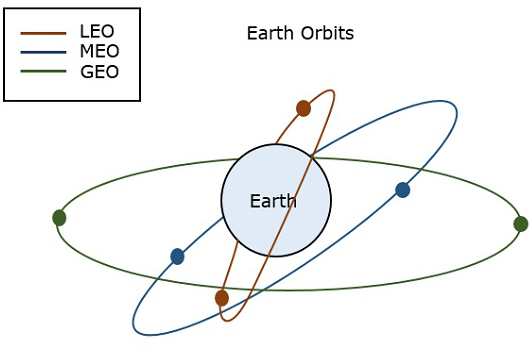
地球同步軌道**(GEO)衛星**是指放置在地球上方**22,300**英里高度的衛星。該軌道與恆星日(即23小時56分鐘)同步。該軌道可以具有傾角和偏心率。
它可能不是圓形的。該軌道可以傾斜於地球的兩極。但是,從地球上觀察時,它看起來是靜止的。這些衛星用於衛星電視。
如果該地球同步軌道是圓形且位於赤道平面內,則稱為**地球靜止軌道**。這些衛星位於地球赤道上方35,900公里(與地球同步軌道相同),並且它們相對於地球的方向(西到東)不斷旋轉。
這些軌道上的衛星的角速度與地球的角速度相同。因此,這些衛星被認為相對於地球是**靜止的**,因為它們與地球的自轉同步。
地球靜止軌道的**優點**是不需要跟蹤天線才能找到衛星的位置。
地球靜止軌道衛星用於天氣預報、衛星電視、衛星廣播和其他型別的全球通訊。
下圖顯示了地球同步軌道和地球靜止軌道之間的區別。旋轉軸表示地球的運動。

注意 − 每個地球靜止軌道都是地球同步軌道。但是,反之則不一定成立。
中地球軌道衛星
中地球軌道**(MEO)**衛星將在距離地球表面約**8000英里**的地方執行。從MEO衛星發射的訊號傳播距離較短。因此,接收端的訊號強度得到改善。這表明在接收端可以使用更小、更輕的接收終端。
**傳輸延遲**可以定義為訊號傳播到衛星並返回到接收站所需的時間。在這種情況下,傳輸延遲較小。因為,訊號到MEO衛星和從MEO衛星返回的傳播距離較短。
對於**即時通訊**,傳輸延遲越短,通訊系統越好。例如,如果GEO衛星往返一次需要0.25秒,則MEO衛星完成相同行程需要不到0.1秒。MEO在2 GHz及以上頻率範圍內工作。
這些衛星用於高速電話訊號。為了覆蓋整個地球,需要10個或更多MEO衛星。
低地球軌道衛星
低地球軌道**(LEO)**衛星主要分為三類。它們是小LEO、大LEO和巨型LEO。LEO將在距離地球表面**500到1000英里**的地方執行。這些衛星用於衛星電話和GPS。
這種相對較短的距離將傳輸延遲縮短至僅0.05秒。這進一步減少了對靈敏且笨重的接收裝置的需求。為了覆蓋整個地球,需要20個或更多LEO衛星。
小LEO將在800 MHz(0.8 GHz)範圍內工作。大LEO將在2 GHz或以上範圍內工作,而巨型LEO在20-30 GHz範圍內工作。
與**巨型LEO**相關的較高頻率轉化為更大的資訊承載能力,併產生即時、低延遲影片傳輸方案的能力。
下圖顯示了LEO、MEO和GEO的路徑
軌道槽位
這裡,可能會出現一個問題,即在200多顆地球同步軌道衛星中,我們如何防止它們相互碰撞或試圖使用太空中的相同位置?
為了解決這個問題,國際電信聯盟**(ITU)**等國際監管機構和美國聯邦通訊委員會**(FCC)**等國家政府組織指定了地球同步軌道上的位置,通訊衛星可以位於這些位置。
這些位置以經度度數指定,稱為**軌道槽位**。由於對軌道槽位的巨大需求,FCC和ITU逐漸將所需的間距縮小到僅2度,用於C波段和Ku波段衛星。
仰角和軌道攝動
如果地球站位於衛星正下方,則將接收最大訊號電平。否則,它將不會接收最大訊號電平,並且隨著地球站的緯度和經度差異的增加,該訊號電平會降低。
因此,根據需要,我們可以將衛星放置在特定的軌道上。現在,讓我們討論一下仰角。
仰角
地球站天線的以下兩個角度組合在一起稱為**仰角**。
- 方位角
- 仰角
通常,這些角度的值對於非地球靜止軌道會發生變化。而對於地球靜止軌道,這些角度的值不會改變。因為,位於地球靜止軌道上的衛星相對於地球看起來是靜止的。
這兩個角度有助於從地球站天線直接指向衛星。因此,地球站天線的**最大增益**可以指向衛星。
我們可以使用地球站的經度和緯度以及衛星軌道的方位來**計算**地球靜止軌道的仰角。
方位角
地球站、衛星和地球中心所在的平面與當地水平面之間的夾角稱為**方位角**。
方位角($\alpha$)的**公式**為
$$\alpha\: = 180^0 + Tan^{-1}\left(\frac{Tan G}{TanL}\right)$$
其中,
L是地球站天線的緯度。
G是衛星軌道位置與地球站天線位置之間的差異。
下圖顯示了方位角。
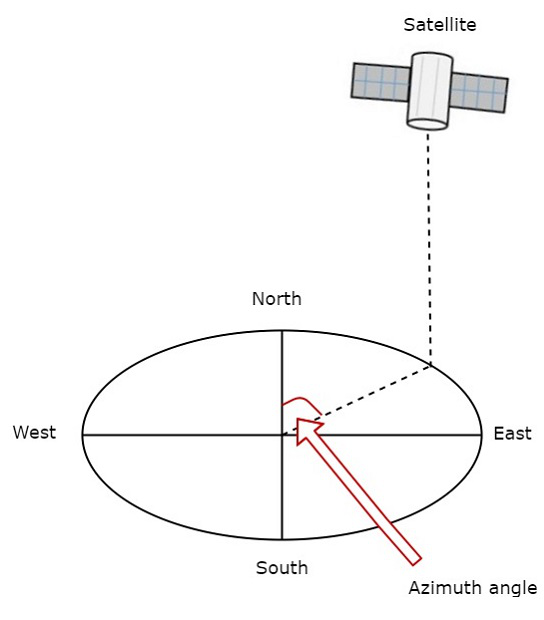
測量地球站天線到北極的**水平角**,如圖所示。它表示方位角。它用於水平跟蹤衛星。
仰角
指向衛星的直線與垂直平面之間的夾角稱為仰角。垂直平面就是垂直於水平平面的平面。
仰角($\beta$)的**公式**為
$$\beta = Tan^{-1}\left(\frac{cosG.cosL-0.15}{\sqrt{1-cos^2G.cos^2L}}\right)$$
我們可以使用上述公式計算仰角。下圖說明了仰角。

如圖所示,測量地球站天線從地面到衛星的垂直角。它表示仰角。
軌道攝動
以下是由於引力和非引力或引數引起的軌道攝動。
由於質量分佈不均勻,地球周圍存在不規則的引力。地球的磁場也會導致軌道攝動。
主要的外部攝動來自太陽和月亮。當衛星靠近這些外部天體時,會受到更強的引力。
低軌道衛星會受到與原子和離子碰撞產生的摩擦影響。
太陽輻射壓會影響使用大型太陽能電池陣列的大型地球同步軌道衛星。
天線發射的射頻輻射產生的自生扭矩和壓力。
大多數衛星使用推進子系統來維持適當的自旋軸方向並控制衛星相對於攝動力的高度。
衛星通訊 - 發射
衛星在其大部分生命週期中都停留在太空中。我們知道太空中存在失重環境。這就是為什麼衛星在太空中不需要額外的堅固框架。但是,在發射過程中需要這些框架。因為在這個過程中,衛星會劇烈震動,直到衛星被放置在合適的軌道上。
衛星的設計應該與一個或多個運載火箭相容,以便將衛星送入軌道。
根據開普勒第二定律,我們知道,對於更高的遠地點高度,公轉週期會更長。地球同步轉移軌道的週期大約為16小時。如果近地點增加到地球同步軌道高度(約36,000公里),那麼公轉週期將增加到24小時。
衛星發射
將衛星放置在適當軌道上的過程稱為發射過程。在此過程中,我們可以從地球站控制衛星的操作。主要有四個階段可以發射衛星。
第一階段 - 發射運載火箭的第一階段包含火箭和燃料,用於將衛星連同運載火箭從地面提升起來。
第二階段 - 發射運載火箭的第二階段包含較小的火箭。這些火箭在第一階段完成後點火。它們有自己的燃料箱,以便將衛星送入太空。
第三階段 - 發射運載火箭的第三(上)階段連線到衛星整流罩。該整流罩是一個金屬遮蔽罩,包含衛星並保護衛星。
第四階段 - 當衛星到達地球大氣層外時,衛星與運載火箭的上級分離。然後,衛星將進入“轉移軌道”。該軌道將衛星送入更高的太空。
當衛星到達軌道所需高度時,其子系統(如太陽能電池板和通訊天線)會展開。然後,衛星在軌道上與其他衛星一起佔據其位置。現在,衛星已準備好為公眾提供服務。
衛星運載火箭
衛星運載火箭根據需要將衛星發射到特定的軌道。衛星運載火箭只不過是多級火箭。以下是兩種型別的衛星運載火箭。
- expendable launch vehicles (消耗性運載火箭)
- Reusable Launch Vehicles (可重複使用運載火箭)
消耗性運載火箭
消耗性運載火箭 (ELV) 在將衛星送入太空後會被摧毀。下圖顯示了 ELV 的外觀。

ELV 包含三個階段。ELV 的第一和第二階段將衛星提升到大約 50 英里和 100 英里。ELV 的第三階段將衛星送入轉移軌道。當衛星到達轉移軌道時,ELV 的任務將完成,其備件將墜落到地球上。
可重複使用運載火箭
可重複使用運載火箭 (RLV) 可以多次用於發射衛星。通常,這種型別的運載火箭在將衛星送入太空後會返回地球。
下圖顯示了一枚可重複使用運載火箭。它也被稱為太空梭。

太空梭的功能類似於 ELV 第一和第二階段的功能。衛星連同太空梭的第三階段安裝在貨艙中。當太空梭到達 150 至 200 英里的高度時,它會從貨艙中彈出。
然後,太空梭的第三階段點火併將衛星送入轉移軌道。之後,太空梭將返回地球以供重複使用。
衛星通訊 - 子系統
在衛星通訊系統中,會發生各種操作。其中,主要操作包括軌道控制、衛星高度、其他子系統的監控和控制。
衛星通訊主要由兩個部分組成。它們是空間段和地面段。因此,相應地將有兩類子系統,即空間段子系統和地面段子系統。下圖說明了這一概念。
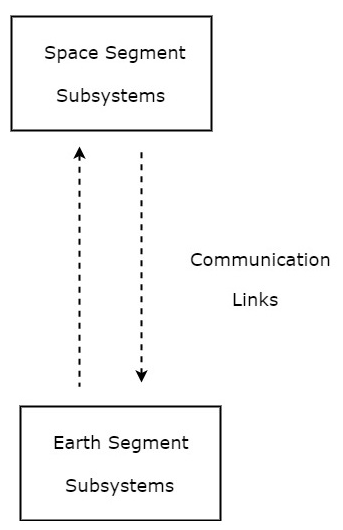
如圖所示,通訊透過通訊鏈路在空間段子系統和地面段子系統之間進行。
空間段子系統
空間段中存在的子系統稱為空間段子系統。以下是空間段子系統。
- AOC 子系統
- TTCM 子系統
- 電源和天線子系統
- 轉發器
地球段子系統
地面段中存在的子系統能夠訪問衛星轉發器,以便在使用者之間提供通訊。地球段也稱為地面段。
地球段主要執行兩個功能。它們是將訊號傳輸到衛星和接收來自衛星的訊號。地球站是地球段中主要存在的子系統。
我們將在後面的章節中討論所有這些空間段和地面段子系統。
衛星通訊 - AOC 子系統
我們知道,由於來自太陽、月球和其他行星的引力,衛星可能會偏離其軌道。由於衛星繞地球執行,這些力在 24 小時內週期性地變化。
高度和軌道控制(AOC) 子系統由火箭發動機組成,當衛星偏離各自軌道時,這些發動機能夠將衛星送入正確的軌道。AOC 子系統有助於使窄波束型別的天線指向地球。
我們可以將此 AOC 子系統分為以下兩部分。
- 高度控制子系統
- 軌道控制子系統
現在,讓我們逐一討論這兩個子系統。
高度控制子系統
高度控制子系統負責衛星在其各自軌道上的方向。以下是使位於軌道上的衛星穩定的兩種方法。
- 旋轉衛星
- 三軸方法
旋轉衛星
在這種方法中,衛星的主體圍繞其自旋軸旋轉。通常,它可以以 30 到 100 rpm 的速度旋轉以產生一種陀螺型別的力。因此,自旋軸得到穩定,並且衛星將指向相同的方向。這種型別的衛星稱為旋轉衛星。
旋轉衛星包含一個圓柱形鼓。該鼓覆蓋有太陽能電池。電源系統和火箭位於此鼓中。
通訊子系統放置在鼓的頂部。一個電動機驅動此通訊系統。該電機的方向與衛星主體的旋轉方向相反,以便天線指向地球。執行此類操作的衛星稱為反旋。
在發射階段,當操作小的徑向氣體噴射器時,衛星旋轉。此後,反旋系統開始工作,以使 TTCM 子系統天線指向地球站。
三軸方法
在這種方法中,我們可以使用一個或多個動量輪來穩定衛星。這種方法稱為三軸方法。這種方法的優點在於可以控制衛星在三個軸上的方向,並且無需旋轉衛星的主體。
在這種方法中,考慮以下三個軸。
滾轉軸被認為是衛星在軌道平面內移動的方向。
偏航軸被認為是朝向地球的方向。
俯仰軸被認為是垂直於軌道平面的方向。
這三個軸在下圖中顯示。

令 XR、YR 和 ZR 分別為滾轉軸、偏航軸和俯仰軸。透過將衛星的位置視為參考來定義這三個軸。這三個軸定義了衛星的高度。
令 X、Y 和 Z 是另一組笛卡爾座標軸。這組三個軸提供了關於衛星相對於參考軸的方向資訊。如果衛星的高度發生變化,則各個軸之間的角度將發生變化。
在這種方法中,每個軸包含兩個氣體噴射器。它們將提供三個軸兩個方向上的旋轉。
當需要衛星在特定軸方向上的運動時,第一個氣體噴射器將執行一段時間。
當衛星到達所需位置時,第二個氣體噴射器將執行相同的時間。因此,第二個氣體噴射器將停止衛星在該軸方向上的運動。
軌道控制子系統
軌道控制子系統有助於將衛星帶到其正確的軌道上,無論何時衛星偏離其軌道。
地球站上存在的 TTCM 子系統監控衛星的位置。如果衛星軌道有任何變化,它會發送關於校正的訊號到軌道控制子系統。然後,它將透過將衛星帶到正確的軌道上來解決該問題。
這樣,AOC 子系統在衛星在太空中整個生命週期中都負責衛星在正確軌道和正確高度上的位置。
衛星通訊 - TTCM 子系統
遙測、跟蹤、指令和監控(TTCM) 子系統存在於衛星和地球站中。通常,衛星透過感測器獲取資料。因此,衛星中存在的遙測子系統將這些資料傳送到地球站。因此,對於任何通訊衛星來說,TTCM 子系統對於成功執行都非常必要。
在將衛星放置在適當軌道後,衛星運營商有責任控制衛星在其生命週期中的執行。這可以透過TTCM 子系統來實現。
我們可以將此 TTCM 子系統分為以下三部分。
- 遙測和監控子系統
- 跟蹤子系統
- 指令子系統
遙測和監控子系統
“遙測”一詞表示遠距離測量。主要在“遙測”中進行以下操作。
生成與待測量成正比的電訊號。
對電訊號進行編碼。
將此程式碼傳輸到遠距離。
衛星中存在的遙測子系統主要執行兩個功能 -
- 接收來自感測器的數據,以及
- 將該資料傳輸到地球站。
衛星有相當多的感測器來監控各種子系統的不同引數,例如壓力、溫度、狀態等。通常,遙測資料以 FSK 或 PSK 形式傳輸。
遙測子系統是一個遠端控制系統。它將衛星的監測資料傳送到地面站。通常,**遙測訊號**攜帶與衛星高度、環境和衛星相關的資訊。
跟蹤子系統
跟蹤子系統用於瞭解衛星的位置及其當前軌道。衛星控制中心**(SCC)**藉助遙測下行鏈路監測空間段子系統的執行和狀態。並且,它使用命令上行鏈路控制這些子系統。
我們知道**跟蹤子系統**也存在於地面站中。它主要關注衛星的距離和仰角。有多種技術用於跟蹤衛星。**例如**,可以使用衛星上存在的速度和加速度感測器獲得的資料來識別衛星軌道位置的變化。
地面站中存在的**跟蹤子系統**在衛星從運載火箭末級釋放後一直跟蹤衛星。它執行諸如在初始軌道和轉移軌道上定位衛星等功能。
指令子系統
命令子系統對於將衛星發射到軌道以及在軌道上執行是必要的。此子系統在這些值出現偏差時調整衛星的高度和軌道。它還控制通訊子系統。此**命令子系統**負責根據從遙測和跟蹤子系統獲得的資料,開啟/關閉衛星中存在的其他子系統。
通常,控制程式碼被轉換為命令字。這些命令字用於以**TDM幀**的形式傳送。最初,命令字的有效性在衛星中進行檢查。在此之後,這些命令字可以傳送回地面站。在這裡,這些命令字再次被檢查。
如果地面站也接收到相同的(正確的)命令字,則它向衛星傳送執行指令。因此,它執行該命令。
從功能上講,遙測子系統和命令子系統彼此相反。因為,第一個將衛星的資訊傳輸到地面站,第二個接收來自地面站的命令訊號。
電源和天線子系統
在本章中,讓我們分別討論一下**電源系統**(衛星的各個子系統從中獲取電源)和**天線子系統**。
電源系統
我們知道,在軌衛星在其整個生命週期內都應持續執行。因此,衛星需要內部電源才能執行其內部的各種電子系統和通訊有效載荷。
**電源系統**是一個至關重要的子系統,它提供衛星執行所需的電源。主要是在這些系統中使用太陽能電池(或電池板)和可充電電池。
太陽能電池
基本上,**太陽能電池**利用入射陽光產生電能(電流)。因此,太陽能電池主要用於為衛星的其他子系統提供電力。
我們知道單個太陽能電池產生的電能非常少。因此,為了產生更多的電能,可以使用以陣列形式存在的電池組。
太陽能電池陣列
衛星中使用了兩種**型別的太陽能電池陣列**。它們是圓柱形太陽能電池陣列和矩形太陽能電池陣列或太陽帆。
**圓柱形太陽能電池陣列**用於旋轉衛星。在任何給定時間,只有一部分圓柱形陣列會被陽光覆蓋。因此,電能由部分太陽能電池陣列產生。這是這種型別的缺點。
**太陽帆**克服了圓柱形太陽能電池陣列的缺點。它可以產生更多的電力,因為太陽帆的所有太陽能電池都暴露在陽光下。
可充電電池
在日食期間,很難從陽光中獲取電力。因此,在這種情況下,其他子系統從**可充電電池**獲取電力。這些電池還在衛星發射期間為其他子系統供電。
通常,這些電池由於太陽能電池在陽光照射下產生的過量電流而充電。
天線子系統
衛星和地面站中都存在天線。現在,讓我們討論一下衛星天線。
衛星天線執行**兩種型別的**功能。它們是接收來自地面站的訊號以及根據需要將訊號傳輸到一個或多個地面站。換句話說,衛星天線接收上行鏈路訊號並傳輸下行鏈路訊號。
我們知道衛星天線的長度與工作頻率成反比。為了減少衛星天線的長度,必須提高工作頻率。因此,衛星天線的工作頻率在**GHz**數量級。
衛星天線
衛星中使用的天線稱為衛星天線。主要有四**種類型的天線**。他們是
- 線天線
- 喇叭天線
- 陣列天線
- 反射天線
現在,讓我們逐一討論這些天線。
線天線

線天線是基本天線。**單極天線**和**偶極天線**屬於此類。它們用於非常高的頻率,以提供TTCM子系統的通訊。
如果用作偶極子的匯流排的長度等於波長的一半(即,l = λ/2),則這種天線稱為**半波偶極天線**。
**線天線**適用於覆蓋其覆蓋範圍並在所有方向上提供訊號強度。這意味著,線天線是全向天線。
喇叭天線
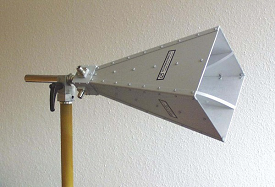
末端帶有孔徑的天線可以稱為**孔徑天線**。當傳輸線的邊緣以開口終止時,會輻射能量。這個開口,也就是孔徑,使它成為孔徑天線。
**喇叭天線**是孔徑天線的一個例子。它用於衛星中,以覆蓋地球上更大的區域。
喇叭天線用於**微波**頻率範圍。相同的饋電喇叭可用於發射和接收訊號。一種名為雙工器的裝置可以分離這兩個訊號。
陣列天線
當單個天線能夠以特定方向輻射一定量的能量,從而獲得更好的傳輸效果時,如果新增更多元件會怎樣,以產生更有效的輸出。正是這個想法導致了**陣列天線**或天線陣列的發明。陣列天線用於衛星中,以從單個孔徑形成多個波束。

反射天線

反射天線適合產生在某個特定方向上具有更大訊號強度的波束。這意味著,這些是高度定向的天線。因此,**拋物面反射器**提高了衛星通訊系統中天線的增益。因此,它們用於電信和廣播。
如果拋物面反射天線用於**發射**訊號,則來自饋電的訊號會從偶極子或喇叭天線發出,以將波聚焦到拋物線上。這意味著,波從焦點發出並撞擊拋物面反射器。此波現在被反射為準直波前。
如果同一根天線用作**接收器**,則當電磁波撞擊拋物線的形狀時,波會被反射到饋電點。偶極子或喇叭天線充當其饋電處的接收天線,接收此訊號,將其轉換為電訊號並將其轉發到接收電路。
衛星通訊 - 中繼器
提供衛星發射和接收天線之間連線鏈路的子系統稱為**中繼器**。它是空間段子系統中最重要的子系統之一。
中繼器在衛星中執行發射器和接收器(響應器)的功能。因此,“中繼器”一詞是透過組合兩個單詞的幾個字母獲得的,發射器**(Trans)**和響應器**(ponder)**。
中繼器框圖
中繼器主要執行**兩個功能**。它們是放大接收到的輸入訊號並轉換其頻率。通常,為上行鏈路和下行鏈路選擇不同的頻率值,以避免發射和接收訊號之間的干擾。
中繼器的**框圖**如下所示。
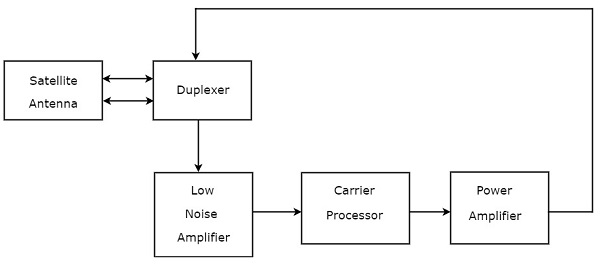
我們可以從框圖本身輕鬆瞭解中繼器的操作。每個模組的功能如下所示。
**雙工器**是一個雙向微波門。它接收來自衛星天線的上行鏈路訊號並將下行鏈路訊號傳輸到衛星天線。
**低噪聲放大器**(LNA)放大微弱的接收訊號。
**載波處理器**執行接收訊號(上行鏈路)的頻率下變頻。此模組確定中繼器的型別。
**功率放大器**將頻率下變頻訊號(下行鏈路)的功率放大到所需電平。
中繼器的型別
基本上,有**兩種型別**的中繼器。它們是彎管中繼器和再生中繼器。
彎管中繼器
彎管中繼器接收微波頻率訊號。它將輸入訊號的頻率轉換為射頻頻率,然後放大它。
彎管中繼器也稱為中繼器和**傳統中繼器**。它適用於模擬和數字訊號。
再生中繼器
再生中繼器執行彎管中繼器的功能。即頻率轉換和放大。除了這兩個功能外,再生中繼器還執行射頻載波到基帶的解調、訊號再生和調製。
再生中繼器也稱為處理中繼器。它僅適用於數字訊號。再生中繼器的主要**優點**是提高信噪比 (SNR) 以及在實現方面具有更大的靈活性。
地球段子系統
衛星通訊系統的**地面段**主要由兩個地面站組成。它們是發射地面站和接收地面站。
發射**地面站**將資訊訊號傳輸到衛星。而接收地面站則從衛星接收資訊訊號。有時,同一個地面站可以同時用於發射和接收。
通常,地面站以以下其中一種形式接收基帶訊號。語音訊號和影片訊號,可以是模擬形式也可以是數字形式。
最初,名為**調頻調製**的模擬調製技術用於傳輸模擬形式的語音和影片訊號。後來,數字調製技術,即頻移鍵控**(FSK)**和相移鍵控**(PSK)**用於傳輸這些訊號。因為,語音和影片訊號都透過從模擬轉換為數字來表示。
地面站框圖
**地面站**的設計不僅取決於地面站的位置,還取決於其他一些因素。地面站的位置可以是陸地、海上船隻和飛機上。相關因素包括提供的服務型別、頻率段利用率、發射機、接收機和天線特性。
數字地面站的**框圖**如下所示。

我們可以從上圖輕鬆瞭解地面站的工作原理。任何地面站中都存在四個主要**子系統**。它們是發射機、接收機、天線和跟蹤子系統。
發射機
二進位制(數字)資訊從地面網路進入地面站的基帶裝置。**編碼器**包含糾錯位,以最大程度地降低誤位元速率。
在衛星通訊中,可以使用頻寬為 36 MHz 的中繼器將中頻**(IF)**選擇為 70 MHz。類似地,還可以使用頻寬為 54 MHz 或 72 MHz 的中繼器將 IF 選擇為 140 MHz。
上變頻器將調製訊號的頻率轉換為更高的頻率。該訊號將使用高功率放大器進行放大。地球站天線發射該訊號。
接收機
在**接收**期間,地球站天線接收下行鏈路訊號。這是一個低電平的調製射頻訊號。通常,接收到的訊號訊號強度較弱。因此,為了放大該訊號,使用低噪聲放大器**(LNA)**。這樣可以提高信噪比**(SNR)**值。
射頻訊號可以**下變頻**到中頻**(IF)**值,該值可以是70或140 MHz。因為在這些中頻更容易解調。
**解碼器**的功能與編碼器正好相反。因此,解碼器透過去除糾錯位並更正任何錯誤的位位置來產生無錯誤的二進位制資訊。
此二進位制資訊提供給基帶裝置進行進一步處理,然後傳遞到地面網路。
地球站天線
**地球站天線**的主要部分是饋電系統和天線反射器。這兩部分組合在一起輻射或接收電磁波。由於饋電系統遵循互易定理,因此地球站天線適用於發射和接收電磁波。
**拋物面反射器**用作地球站中的主天線。這些反射器的增益很高。它們能夠將平行光束聚焦到焦點處的一個點,饋電系統位於該點。
跟蹤子系統
**跟蹤子系統**跟蹤衛星並確保光束朝向它以建立通訊。地球站中存在的跟蹤系統主要執行**兩個功能**。分別是衛星捕獲和衛星跟蹤。可以透過以下幾種方式之一進行跟蹤。分別是自動跟蹤、手動跟蹤和程式跟蹤。
地球站示例
在本章中,讓我們討論地球站的兩個示例:**僅接收家庭電視系統**和**社群天線電視系統**。
僅接收家庭電視系統
如果廣播直接到家庭電視接收機,則此類服務稱為直接廣播衛星**(DBS)**服務。
網狀反射器可用於將訊號聚焦到**雙饋喇叭**中。它有兩個獨立的輸出。一個輸出將獲得C波段訊號,另一個輸出將獲得Ku波段訊號。
電視節目主要源於第一代訊號。這些訊號透過衛星傳輸到C波段的網路主端站。這些訊號被壓縮並以數字形式傳輸到有線電視和DBS提供商。
C波段使用者可以訂閱付費電影片道。由於提供多源節目,因此與有線電視相比,這些訂閱服務**更便宜**。
DBS電視接收機的**框圖**如下圖所示。

室外單元
室外單元主要由**接收天線**和低噪聲轉換器**(LNC)**組成。低噪聲轉換器(LNC)只不過是低噪聲放大器(LNA)後面跟著一個轉換器的組合。接收天線直接饋入LNC。
通常,**拋物面反射器**也與接收喇叭天線一起使用,以進一步聚焦光束。
室內單元
通常,饋送到室內單元的訊號是寬頻訊號。該訊號的頻率介於950 MHz和1450 MHz之間。在室內單元中,該訊號使用**放大器**進行放大。
放大後的訊號施加到跟蹤濾波器和下變頻器。它選擇所需的通道並將頻率轉換為70 MHz的**中頻**(IF)。
**中頻放大器**放大訊號強度以便正確解調。基帶(解調)訊號用於生成殘留邊帶訊號(VSSB)。該訊號饋入標準電視機的VHF/UHF通道之一。
DBS電視使用頻率調製(FM)。而傳統電視使用殘留邊帶訊號(VSSB)形式的幅度調製(AM)。這是DBS電視和傳統電視之間的**主要區別**。
社群天線電視系統
社群天線電視**(CATV)**系統使用一個室外單元和多個饋電。這些饋電針對每個極化方向分別提供。因此,所有通道將同時出現在室內接收機上。
CATV系統室內單元的**框圖**如下圖所示。
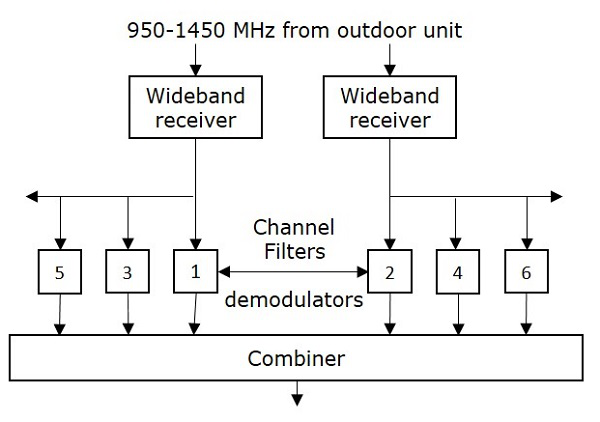
在這種情況下,每個使用者不需要單獨的接收機。因為所有載波都在一個公共接收器-濾波器系統中解調。之後,將通道組合成多路複用訊號。然後,該訊號透過電纜傳輸到使用者(使用者)。
衛星通訊 - 鏈路預算
在衛星通訊系統中,有兩種型別的功率計算。分別是發射功率和接收功率計算。通常,這些計算稱為**鏈路預算計算**。功率的單位是**分貝**。
首先,讓我們討論鏈路預算中使用的基本術語,然後我們將繼續解釋鏈路預算計算。
基本術語
**各向同性輻射器**(天線)向所有方向輻射相等。但實際上它並不存在。它只是一個理論天線。我們可以將所有真實(實用)天線的效能與該天線進行比較。
功率通量密度
假設一個各向同性輻射器位於半徑為r的球體的中心。我們知道功率通量密度是功率流與單位面積之比。
各向同性輻射器的**功率通量密度**,$\Psi_i$為
$$\Psi_i = \frac{p_s}{4\pi r^2}$$
其中,$P_s$是功率流。通常,實際天線的功率通量密度隨方向變化。但是,它的**最大值**僅在一個特定方向上。
天線增益
實際天線的**增益**定義為實際天線最大功率通量密度與各向同性天線功率通量密度之比。
因此,天線增益或**天線增益**G為
$$G = \frac{\Psi_m}{\Psi_i}$$
其中,$\Psi_m$是實際天線最大功率通量密度。$\Psi_i$是各向同性輻射器(天線)的功率通量密度。
等效各向同性輻射功率
等效各向同性輻射功率(EIRP)是鏈路預算測量中使用的主要引數。**數學上**,可以寫成
$$EIRP = G\:\:P_s$$
我們可以用**分貝**表示EIRP為
$$\left [ EIRP \right ] = \left [ G \right ] + \left [ P_s \right ]dBW$$
其中,**G**是發射天線的增益,$P_s$是發射機的功率。
傳輸損耗
在一端傳送的功率與接收站接收到的功率之間的差異稱為**傳輸損耗**。損耗可分為兩種型別。
- 恆定損耗
- 可變損耗
饋線損耗等恆定的損耗稱為**恆定損耗**。無論我們採取了何種預防措施,這些損耗都必然會發生。
另一種損耗是**可變損耗**。天空和天氣狀況是這種損耗的一個例子。也就是說,如果天空不晴朗,訊號將無法有效地到達衛星,反之亦然。
因此,我們的程式首先包括計算晴朗天氣或晴朗天空條件下的損耗,因為這些損耗是恆定的。它們不會隨時間變化。然後,在第二步中,我們可以計算惡劣天氣條件下的損耗。
鏈路預算計算
由於有兩個鏈路,即**上行鏈路**和**下行鏈路**,因此鏈路預算計算有兩種型別。
地球站上行鏈路
它是地球將訊號傳輸到衛星,而衛星接收訊號的過程。其**數學方程**可以寫成
$$\left(\frac{C}{N_0}\right)_U = [EIRP]_U+\left(\frac{G}{T}\right)_U - [LOSSES]_U -K$$
其中,
- $\left [\frac{C}{N_0}\right ]$是載噪比密度
- $\left [\frac{G}{T}\right ]$是衛星接收機的G/T比,單位為dB/K
此處,損耗表示衛星接收機的饋線損耗。所有依賴於頻率的損耗都考慮在內。
為了有效地上行鏈路,EIRP值應儘可能低。當我們獲得晴朗的天空條件時,這是可能的。
這裡我們使用了(下標)表示法“U”,表示上行鏈路現象。
衛星下行鏈路
在此過程中,衛星傳送訊號,地球站接收訊號。該方程與衛星上行鏈路相同,區別在於我們到處都使用縮寫“D”而不是“U”來表示下行鏈路現象。
其**數學**方程可以寫成:
$$\left [\frac{C}{N_0}\right ]_D = \left [ EIRP \right ]_D + \left [ \frac{G}{T} \right ]_D - \left [ LOSSES \right ]_D - K$$
其中,
- $\left [\frac{C}{N_0}\right ]$是載噪比密度
- $\left [\frac{G}{T}\right ]$是地球站接收機的G/T比,單位為dB/K
這裡,所有存在於地球站周圍的損耗。
在上式中,我們沒有包含訊號頻寬B。但是,如果我們包含該頻寬,則方程將修改如下。
$$\left [\frac{C}{N_0}\right ]_D = \left [ EIRP \right ]_D + \left [ \frac{G}{T} \right ]_D - \left [ LOSSES \right ]_D -K-B$$
鏈路預算
如果我們將地面衛星考慮在內,則還應考慮自由空間擴充套件損耗(FSP)。
如果天線未正確對準,則可能發生損耗。因此,我們考慮**AML**(天線未對準損耗)。類似地,當訊號從衛星向地球傳播時,它會與地球表面碰撞,其中一些會被吸收。這些由大氣吸收損耗**“AA”**來處理,並以db為單位測量。
現在,我們可以為晴朗天空寫出損耗方程為
$$損耗 = FSL + RFL + AML + AA + PL$$
其中,
RFL 代表接收饋線損耗,單位為 dB。
PL 代表極化失配損耗。
現在,接收功率的**分貝方程**可以寫成
$$P_R = EIRP + G_R + 損耗$$
其中,
- $P_R$ 代表接收功率,以 dBW 為單位。
- $G_r$ 是接收天線增益。
下行鏈路的設計比上行鏈路的設計更關鍵。因為發射所需的功率和天線的增益存在限制。
多址接入技術
有時,衛星的服務在某個地球站位置存在,有時不存在。這意味著,一顆衛星可能在不同地點擁有不同的服務站。它們向衛星傳送載波訊號。
在這種情況下,我們使用多址接入技術,使衛星能夠在不同時間從不同的站接收或傳送訊號,而不會相互干擾。以下是**三種**多址接入技術。
- FDMA(分頻多重進接)
- TDMA(分時多重進接)
- CDMA(分碼多重進接)
現在,讓我們逐一討論每種技術。
FDMA
在這種多址接入方式中,我們為每個訊號分配不同的頻段(範圍)。因此,任何兩個訊號都不應該具有相同的頻率範圍。因此,即使我們在一個通道中傳送這些訊號,它們之間也不會發生干擾。
這種接入方式的一個完美的**例子**是我們的廣播電臺。我們可以看到,每個電臺都被分配了不同的頻段來進行操作。
讓我們考慮三個站點 A、B 和 C。我們希望透過 FDMA 技術訪問它們。因此,我們為它們分配了不同的頻段。
如圖所示,衛星站 A 保持在 0 到 20 Hz 的頻率範圍內。類似地,站點 B 和 C 分別被分配了 30-60 Hz 和 70-90 Hz 的頻率範圍。它們之間沒有干擾。
這種系統的主要**缺點**是它非常突發性。對於動態且不均勻的通道,不建議使用這種多址接入方式。因為它會使資料變得不靈活且效率低下。
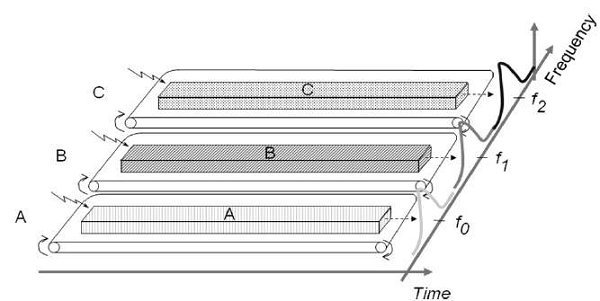
TDMA
顧名思義,TDMA 是一種基於時間的接入方式。在這裡,我們為每個通道提供一定的時間幀。在該時間幀內,通道可以訪問整個頻譜頻寬。
每個站點都有一個固定長度的時隙。未使用的時隙將保持空閒狀態。
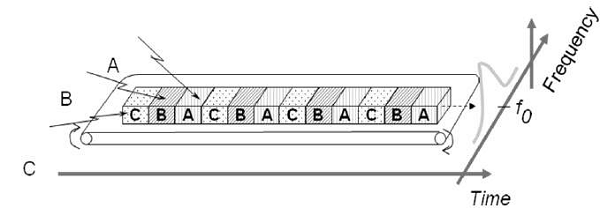
假設,我們希望使用 TDMA 技術向特定通道傳送五個資料包。因此,我們應該為它們分配某些時隙或**時間幀**,在這些時隙或時間幀內,它可以訪問整個頻寬。
在上圖中,資料包 1、3 和 4 是活動的,它們傳輸資料。而資料包 2 和 5 由於未參與而處於空閒狀態。每次我們為該特定通道分配頻寬時,此格式都會重複。
雖然我們已為特定通道分配了某些時隙,但它也可以根據負載能力進行更改。這意味著,如果一個通道傳輸較重的負載,則可以為其分配比傳輸較輕負載的通道更大的時隙。這是 TDMA 相對於 FDMA 的最大**優勢**。TDMA 的另一個優勢是功耗非常低。
**注意** - 在某些應用中,我們使用**TDMA 和 FDMA**技術的**組合**。在這種情況下,每個通道將在特定時間幀內在特定頻段內執行。在這種情況下,頻率選擇更加魯棒,並且它具有比時間壓縮更大的容量。
CDMA
在 CDMA 技術中,為每個通道分配了一個唯一的程式碼,以區分彼此。這種多址接入方式的一個完美的**例子**是我們的蜂窩系統。我們可以看到,儘管他們都是使用相同頻寬的相同 X 或 Y 移動服務提供商的客戶,但沒有兩個人的手機號碼是相同的。
在 CDMA 過程中,我們對編碼訊號和碼片序列的內積進行解碼。因此,在數學上可以寫成
$$編碼訊號 = 原始資料 × 碼片序列$$
這種多址接入方式的基本**優勢**在於,它允許所有使用者共存並在同一時間使用整個頻寬。由於每個使用者都有不同的程式碼,因此不會有任何干擾。
在這種技術中,許多站點可以擁有多個通道,這與 FDMA 和 TDMA 不同。這種技術最好的部分是每個站點都可以始終使用整個頻譜。
衛星通訊 - 服務
衛星通訊的服務可以分為以下兩類。
- 單向衛星通訊鏈路服務
- 雙向衛星通訊鏈路服務
現在,讓我們逐一討論每種服務。
單向衛星通訊鏈路服務
在**單向**衛星通訊鏈路服務中,資訊可以透過衛星從一個地球站傳輸到一個或多個地球站。這意味著,它提供點對點連線和點對多點連線。
下圖顯示了單向衛星通訊鏈路服務的示例。
在這裡,通訊透過衛星在**一個方向**上在地球表面上的第一個地球站(發射器)和第二個地球站(接收器)之間進行。
以下是一些**單向**衛星通訊鏈路**服務**。
廣播衛星服務,如廣播、電視和網際網路服務。
空間操作服務,如遙測、跟蹤和控制服務。
無線電測定衛星服務,如位置定位服務。
雙向衛星通訊鏈路服務
在**雙向**衛星通訊鏈路中,資訊可以透過衛星在任何兩個地球站之間交換。這意味著,它僅提供點對點連線。
下圖顯示了雙向衛星通訊鏈路服務的示例。
在這裡,通訊透過衛星在**兩個**(兩個)**方向**上在地球表面上的第一個地球站(發射器)和第二個地球站(接收器)之間進行。
以下是一些雙向衛星通訊鏈路**服務**。
固定衛星服務,如電話、傳真和高位元率資料服務。
移動衛星服務,如陸地移動、海事和航空行動通訊服務。
全球定位系統
**全球定位系統 (GPS)** 是一種基於衛星的導航系統。它引發了導航和位置定位的革命。它主要用於定位、導航、監控和測量應用。
衛星導航的主要**優勢**是即時定位和時間同步。這就是為什麼衛星導航系統已成為大多數應用中不可或缺的一部分,其中移動性是關鍵引數。
一個完整的 GPS 空間段包含 24 顆在中等地球軌道 (MEO) 上執行的衛星。這些衛星被分成 6 組,每組包含 4 顆衛星。4 顆衛星一組稱為一個**星座**。任何兩個相鄰星座在經度上相隔 60 度。
每顆衛星的**軌道週期**大約等於**12 小時**。因此,所有衛星每天繞地球旋轉兩次。在任何時間,GPS 接收器都將接收來自至少 4 顆衛星的訊號。
GPS 程式碼和服務
每顆 GPS 衛星發射兩個訊號,**L1 和 L2** 具有不同的頻率。**三邊測量**是一種查詢 GPS 接收器位置(緯度、經度、高度)的簡單方法。使用這種方法,可以根據三個已知點測量未知點的位置。
GPS 程式碼
以下是兩種型別的 GPS 程式碼。
- 粗捕獲碼或 C/A 碼
- 精密碼或 P 碼
訊號 L1 以 1.023 Mbps 偽隨機位元序列進行調製。此程式碼稱為粗捕獲碼或**C/A 碼**,供公眾使用。
訊號 L2 以 10.23 Mbps 偽隨機位元序列進行調製。此程式碼稱為精密碼或**P 碼**,用於軍事定位系統。通常,此 P 碼以加密格式傳輸,稱為**Y 碼**。
與 C/A 碼相比,P 碼具有更好的測量精度,因為 P 碼的位元率大於 C/A 碼的位元率。
GPS 服務
以下是 GPS 提供的兩種服務。
- 精密定位服務 (PPS)
- 標準定位服務 (SPS)
**PPS 接收器**跟蹤兩個訊號 L1 和 L2 上的 C/A 碼和 P 碼。Y 碼在接收器處被解密以獲取 P 碼。
**SPS 接收器**僅跟蹤訊號 L1 上的 C/A 碼。
GPS 接收器
在 GPS 系統中,衛星到使用者的傳輸是單向的。因此,單個使用者不需要發射器,只需要一個**GPS 接收器**。它主要用於查詢物體的準確位置。它透過使用從衛星接收到的訊號來執行此任務。
GPS 接收器的**框圖**如下圖所示。
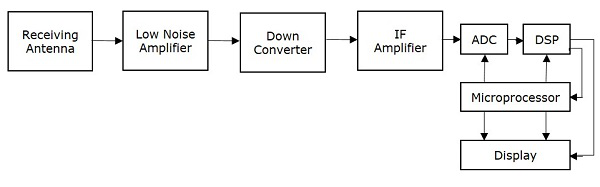
GPS 接收器中每個模組的功能如下所述。
**接收天線**接收衛星訊號。它主要是一個圓極化天線。
**低噪聲放大器** (LNA) 放大微弱的接收訊號。
**下變頻器**將接收訊號的頻率轉換為中頻 (IF) 訊號。
**中頻放大器**放大中頻 (IF) 訊號。
**ADC** 執行從 IF 放大器獲得的模擬訊號到數字訊號的轉換。假設取樣和量化模組也存在於 ADC(模數轉換器)中。
**DSP**(數字訊號處理器)生成 C/A 碼。
**微處理器**執行位置計算並提供時序訊號以控制其他數字模組的操作。它將有用的資訊傳送到顯示單元,以便在螢幕上顯示。