人工智慧 - 智慧體與環境
一個 AI 系統由一個智慧體及其環境組成。智慧體在其環境中行動。環境可能包含其他智慧體。
什麼是智慧體和環境?
智慧體是指任何能夠透過感測器感知其環境並透過效應器作用於該環境的事物。
人類智慧體擁有與感測器平行的感官器官,如眼睛、耳朵、鼻子、舌頭和皮膚,以及其他器官,如手、腳、嘴,作為效應器。
機器人智慧體用攝像頭和紅外測距儀代替感測器,用各種電機和執行器代替效應器。
軟體智慧體將其程式和動作編碼為位元串。

智慧體術語
智慧體的效能度量 - 它是決定智慧體成功程度的標準。
智慧體的行為 - 智慧體在任何給定的感知序列之後執行的動作。
感知 - 智慧體在給定時刻的感知輸入。
感知序列 - 智慧體迄今為止感知到的所有內容的歷史記錄。
智慧體函式 - 它是一個從感知序列到動作的對映。
理性
理性無非是合理、明智和具有良好判斷力的狀態。
理性關注的是預期行動和結果,具體取決於智慧體感知到的內容。以獲取有用資訊為目標執行操作是理性中的重要部分。
什麼是理想理性智慧體?
理想理性智慧體是指能夠執行預期操作以最大化其效能度量的智慧體,其依據是 -
- 其感知序列
- 其內建的知識庫
智慧體的理性取決於以下因素 -
效能度量,決定成功的程度。
智慧體迄今為止的感知序列。
智慧體關於環境的先驗知識。
智慧體可以執行的動作。
理性智慧體始終執行正確的動作,其中正確動作是指導致智慧體在給定感知序列中獲得最大成功的動作。智慧體解決的問題的特徵在於效能度量、環境、執行器和感測器 (PEAS)。
智慧體的結構
智慧體的結構可以視為 -
- 智慧體 = 架構 + 智慧體程式
- 架構 = 智慧體執行的機器。
- 智慧體程式 = 智慧體函式的實現。
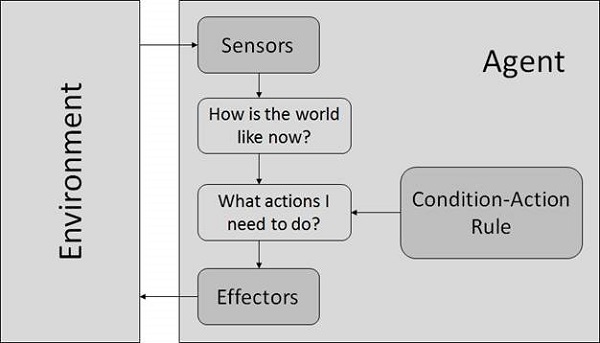
簡單反射智慧體
- 它們僅根據當前感知選擇動作。
- 只有當僅根據當前感知做出正確決策時,它們才是理性的。
- 它們的環境是完全可觀察的。
條件-動作規則 - 它是一個將狀態(條件)對映到動作的規則。
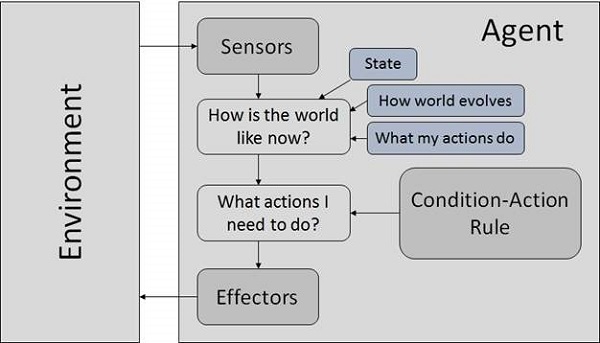
基於模型的反射智慧體
它們使用世界的模型來選擇其動作。它們維護一個內部狀態。
模型 - 關於“世界上事物如何發生”的知識。
內部狀態 - 它是一個關於當前狀態的未觀察到的方面的表示,取決於感知歷史。
更新狀態需要以下資訊 -
- 世界如何演變。
- 智慧體的動作如何影響世界。
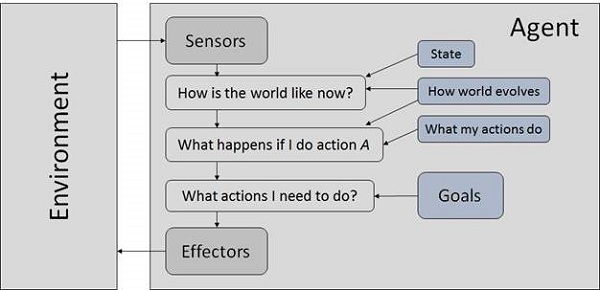
基於目標的智慧體
它們選擇其動作以實現目標。基於目標的方法比反射智慧體更靈活,因為支援決策的知識被顯式建模,從而允許進行修改。
目標 - 它是對理想情況的描述。
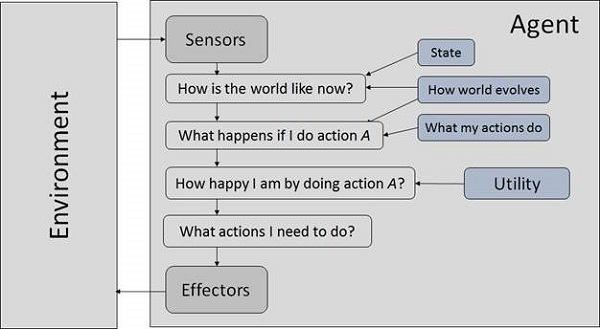
基於效用的智慧體
它們根據對每個狀態的偏好(效用)選擇動作。
當以下情況發生時,目標是不夠的 -
存在相互衝突的目標,其中只能實現少數目標。
目標實現存在一定的不確定性,您需要權衡成功的可能性與目標的重要性。
環境的性質
一些程式在完全人工環境中執行,該環境僅限於鍵盤輸入、資料庫、計算機檔案系統和螢幕上的字元輸出。
相比之下,一些軟體智慧體(軟體機器人或軟機器人)存在於豐富、無限的軟機器人領域。模擬器具有非常詳細、複雜的環境。軟體智慧體需要即時地從一系列動作中進行選擇。一個旨在掃描客戶線上偏好並向客戶展示有趣商品的軟機器人工作在真實和人工環境中。
最著名的人工環境是圖靈測試環境,其中一個真實智慧體和另一個人工智慧體在同等條件下進行測試。這是一個非常具有挑戰性的環境,因為軟體智慧體很難像人類一樣表現。
圖靈測試
可以使用圖靈測試來衡量系統智慧行為的成功程度。
兩個參與者和一個待評估的機器參與測試。在兩個人中,一個人扮演測試者的角色。他們各自坐在不同的房間裡。測試者不知道誰是機器誰是人類。他透過鍵入和傳送問題來詢問這兩個智慧體,並收到鍵入的回覆。
此測試旨在愚弄測試者。如果測試者無法從人類的反應中區分出機器的反應,則稱該機器具有智慧。
環境的特性
環境具有多種特性 -
離散/連續 - 如果環境存在有限數量的不同的、明確定義的狀態,則該環境是離散的(例如,國際象棋);否則它是連續的(例如,駕駛)。
可觀察/部分可觀察 - 如果可以從感知中確定環境在每個時間點的完整狀態,則它是可觀察的;否則它僅部分可觀察。
靜態/動態 - 如果環境在智慧體行動時不發生變化,則它是靜態的;否則它是動態的。
單智慧體/多智慧體 - 環境可能包含其他智慧體,這些智慧體可能與智慧體相同或不同。
可訪問/不可訪問 - 如果智慧體的感官裝置可以訪問環境的完整狀態,則該環境對於該智慧體是可訪問的。
確定性/非確定性 - 如果環境的下一個狀態完全由當前狀態和智慧體的動作決定,則該環境是確定性的;否則它是非確定性的。
情景/非情景 - 在情景環境中,每個情景都包括智慧體感知然後採取行動。其行動的質量僅取決於情景本身。後續情景不依賴於先前情景中的行動。情景環境要簡單得多,因為智慧體不需要提前思考。