- Arduino 教程
- Arduino - 首頁
- Arduino - 概述
- Arduino - 開發板描述
- Arduino - 安裝
- Arduino - 程式結構
- Arduino - 資料型別
- Arduino - 變數與常量
- Arduino - 運算子
- Arduino - 控制語句
- Arduino - 迴圈
- Arduino - 函式
- Arduino - 字串
- Arduino - 字串物件
- Arduino - 時間
- Arduino - 陣列
- Arduino 函式庫
- Arduino - I/O 函式
- Arduino - 高階 I/O 函式
- Arduino - 字元函式
- Arduino - 數學庫
- Arduino - 三角函式
- Arduino 高階應用
- Arduino - Due & Zero
- Arduino - 脈寬調製 (PWM)
- Arduino - 隨機數
- Arduino - 中斷
- Arduino - 通訊
- Arduino - 積體電路 (I2C)
- Arduino - 序列外設介面 (SPI)
- Arduino 專案
- Arduino - 閃爍 LED
- Arduino - 漸變 LED
- Arduino - 讀取模擬電壓
- Arduino - LED 條形圖
- Arduino - 鍵盤登出
- Arduino - 鍵盤訊息
- Arduino - 滑鼠按鍵控制
- Arduino - 鍵盤序列埠
- Arduino 感測器
- Arduino - 溼度感測器
- Arduino - 溫度感測器
- Arduino - 水位檢測/感測器
- Arduino - PIR 感測器
- Arduino - 超聲波感測器
- Arduino - 連線開關
- 電機控制
- Arduino - 直流電機
- Arduino - 伺服電機
- Arduino - 步進電機
- Arduino 和聲音
- Arduino - 音調庫
- Arduino - 無線通訊
- Arduino - 網路通訊
- Arduino 有用資源
- Arduino - 快速指南
- Arduino - 有用資源
- Arduino - 討論
Arduino - 通訊
為了實現這種資料交換,已經定義了數百種通訊協議。每種協議都可以分為兩類之一:並行或序列。
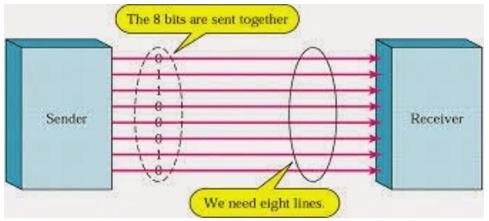
並行通訊
透過輸入/輸出埠進行Arduino和外圍裝置之間的並行連線是短距離(最多幾米)的理想解決方案。但是,在其他情況下,如果需要在兩個裝置之間建立更長距離的通訊,則無法使用並行連線。並行介面同時傳輸多個位。它們通常需要資料匯流排——跨越八根、十六根或更多線進行傳輸。資料以巨大的、衝擊性的1和0波的形式傳輸。
並行通訊的優點和缺點
並行通訊當然有其優點。它比序列快,簡單明瞭,並且相對易於實現。但是,它需要許多輸入/輸出 (I/O) 埠和線路。如果您曾經將專案從基本的Arduino Uno遷移到Mega,您就會知道微處理器上的I/O線路可能是寶貴的且數量有限的。因此,我們更喜歡序列通訊,犧牲潛在的速度來換取引腳空間。
序列通訊模組
如今,大多數Arduino開發板都將幾種不同的序列通訊系統作為標準裝置內建。
使用這些系統中的哪一個取決於以下因素:
- 微控制器必須與多少個裝置交換資料?
- 資料交換速度必須有多快?
- 這些裝置之間的距離是多少?
- 是否需要同時傳送和接收資料?
關於序列通訊最重要的事情之一是**協議**,必須嚴格遵守。它是一套規則,必須應用這些規則,以便裝置能夠正確解釋它們相互交換的資料。幸運的是,Arduino會自動處理這個問題,從而將程式設計師/使用者的工作簡化為簡單的寫入(要傳送的資料)和讀取(接收到的資料)。
序列通訊型別
序列通訊可以進一步分類為:
**同步** - 同步的裝置使用相同的時鐘,並且它們的定時與彼此同步。
**非同步** - 非同步的裝置有自己的時鐘,並由前一狀態的輸出觸發。
很容易找出裝置是否同步。如果將相同的時鐘提供給所有連線的裝置,則它們是同步的。如果沒有時鐘線,則它是非同步的。
例如,UART(通用非同步收發器)模組是非同步的。
非同步序列協議具有一些內建規則。這些規則只不過是幫助確保健壯且無錯誤資料傳輸的機制。這些機制(我們為了避免外部時鐘訊號而獲得的機制)是:
- 同步位
- 資料位
- 奇偶校驗位
- 波特率
同步位
同步位是與每個資料包一起傳輸的兩三個特殊位。它們是起始位和停止位。顧名思義,這些位分別標記資料包的開頭和結尾。
始終只有一個起始位,但停止位的數量可配置為一個或兩個(儘管通常保留為一個)。
起始位始終由空閒資料線從1變為0指示,而停止位將透過將線路保持為1而轉換回空閒狀態。

資料位
每個資料包中的資料量可以設定為從5到9位的任何大小。當然,標準資料大小是您的基本8位位元組,但其他大小也有其用途。7位資料包可能比8位更有效,特別是如果您只是傳輸7位ASCII字元。
奇偶校驗位
使用者可以選擇是否應該有奇偶校驗位,如果有的,奇偶校驗應該是奇數還是偶數。如果資料位中1的個數為偶數,則奇偶校驗位為0。奇校驗正好相反。
波特率
術語波特率用於表示每秒傳輸的位數 [bps]。請注意,它指的是位,而不是位元組。協議通常要求每個位元組都與幾個控制位一起傳輸。這意味著序列資料流中的一個位元組可能包含11位。例如,如果波特率為300 bps,則每秒最多可以傳輸37個位元組,最少可以傳輸27個位元組。
Arduino UART
以下程式碼將使Arduino在啟動時傳送hello world。
void setup() {
Serial.begin(9600); //set up serial library baud rate to 9600
Serial.println("hello world"); //print hello world
}
void loop() {
}
將Arduino程式上傳到Arduino後,開啟Arduino IDE右上角的序列埠監視器  。
。
在序列埠監視器的頂部框中輸入任何內容,然後按鍵盤上的傳送或回車鍵。這將向Arduino傳送一系列位元組。
以下程式碼返回它接收到的任何輸入。
以下程式碼將使Arduino根據提供的輸入提供輸出。
void setup() {
Serial.begin(9600); //set up serial library baud rate to 9600
}
void loop() {
if(Serial.available()) //if number of bytes (characters) available for reading from {
serial port
Serial.print("I received:"); //print I received
Serial.write(Serial.read()); //send what you read
}
}
請注意,**Serial.print** 和 **Serial.println** 將返回實際的ASCII程式碼,而 **Serial.write** 將返回實際的文字。有關更多資訊,請參閱ASCII程式碼。