
 資料結構
資料結構 網路
網路 關係資料庫管理系統
關係資料庫管理系統 作業系統
作業系統 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C 程式設計
C 程式設計 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP直流牽引電動機的啟動和速度控制方法
在本文中,我們將瞭解用於啟動和控制直流串勵電動機速度的各種方法。
電阻調速
採用電阻啟動的基本牽引電動機電路如下圖所示。
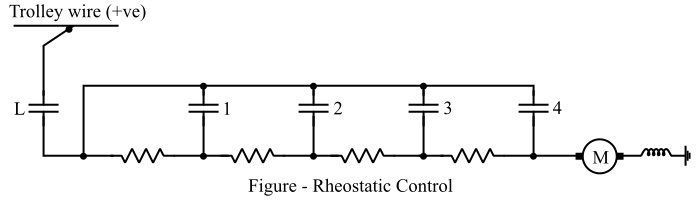
直流串勵電動機可以透過在電動機主電路中串聯一個外部電阻來啟動。在啟動瞬間,電動機產生的反電動勢為零,因此與電動機串聯的電阻最大,其值為在額定滿載電流下其上的電壓降等於電源電壓。隨著電動機速度的提高,電動機的反電動勢增加,因此,為了在整個啟動和加速期間保持電流恆定,逐漸減小外部電阻。
在這種直流牽引電動機速度啟動和控制方法中,外部電路存在相當大的能量損失。這種方法中使用的電阻是為短時間額定設計的,而不是為連續額定設計的。這是因為,它們僅在電動機啟動期間需要承載電流。因此,電動機只能具有一個速度特性。
串並聯控制
當有兩個或多個直流牽引電動機時,串並聯方法可以部分克服電阻調速中電能浪費的主要缺點。
步驟一
考慮兩個直流串勵電動機,這兩個電動機首先彼此串聯,並與一個啟動或控制電阻串聯,如圖 (a) 所示。隨著電動機達到速度,控制器逐漸切除控制電阻,最終控制電阻完全從電路中移除,然後每個電動機在其兩端具有線路電壓的一半,如圖 (b) 所示。這樣就獲得了電動機的第一執行位置。在此位置,對於任何給定的電樞電流值,每個電動機都將以其正常速度的一半執行。
 (b).png)
這裡需要注意的是,電路中沒有外部電阻。因此,沒有能量浪費,因此電動機的效率幾乎等於每個電動機端子上具有全線電壓時可獲得的效率。
步驟二
在第二步中,兩個電動機並聯連線,並與一個外部可變電阻串聯,如圖 (c) 所示。隨著電動機達到速度,逐漸切除此電阻,最終此電阻完全從電路中移除,如圖 (d) 所示。這樣就獲得了第二個執行位置,在此位置,每個電動機都連線到全線電壓上。
 (d).png)
磁場控制
由於直流串勵電動機的速度與磁通成反比,假設線路電壓恆定。因此,可以透過改變磁通來改變電動機的速度。對於直流串勵電動機,可以改變直流串勵電動機的磁通 -
透過在串勵繞組與並聯連線一個可變電阻(稱為分流電阻),參見圖 1。
透過切除一些串勵繞組匝數,參見圖 2。
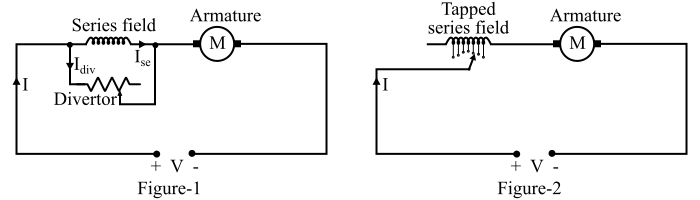
由於在上述兩種情況下,磁通只能減小,因此此方法也稱為**磁場削弱法**。透過這種方法,可以獲得高於正常速度的速度,並且可以將速度提高到正常速度的 15% 到 30%。
實際上,磁場控制方法不適用於啟動目的。此方法僅在電動機透過串並聯控制方法達到最大可能速度時,才能用於將牽引電動機的速度提高 10% 到 15%。
電動機-發電機機車控制
電動機-發電機組由一臺單相同步電動機驅動一個或兩個直流發電機和一臺位於同一軸上的勵磁機組成。M-G 組通常由啟動電動機啟動並加速到速度,並在達到速度時自動同步。
可以透過勵磁機的磁場控制來調節發電機電壓。因此,牽引電動機供電電路中不需要額外的電阻,也不需要串並聯控制來獲得經濟的執行速度。此外,它還可以節省牽引電動機控制中的電阻損耗。

5K+ 次檢視
