
 資料結構
資料結構 網路
網路 RDBMS
RDBMS 作業系統
作業系統 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C 程式設計
C 程式設計 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP同步定位與地圖構建
介紹
同步定位與地圖構建(SLAM)是一種讓我們同時構建地圖並在該地圖上定位車輛的方法。SLAM 演算法用於未知環境建模和同步定位。
SLAM 如何有用?
工程師可以使用 SLAM 來避開障礙物,還可以將其用於路徑規劃。
SLAM 軟體允許機器人系統、無人機或自動駕駛汽車在未知環境和複雜地形中找到路徑。此過程涉及大量計算和處理能力。
SLAM 可用於繪製對人類勘探來說太小或太危險的區域的地圖
SLAM 的工作原理
同步定位與地圖構建中使用了兩種型別的技術。
第一種(距離測量),前端處理器包含訊號處理器或感測器,並且在很大程度上取決於感測器型別及其效率。SLAM 解決方案包括允許機器人或其他車輛觀察周圍環境的外部裝置。這可以是攝像頭、強大的感測器或雷射雷達,以測量環境的物理屬性,如位置、距離或速度。
第二種(資料提取和後處理),是後端堆疊,它不包含任何感測器,但可以接收來自前端的訊號並進行位姿圖最佳化。“後端”解決方案用於提取感測器或測量儀器收集的資料。這些資訊經過處理並用於識別周圍環境中的地標。它們可能包含執行高效演算法的複雜計算機軟體。
讓我們看一下一些前端處理元件。
雷射雷達
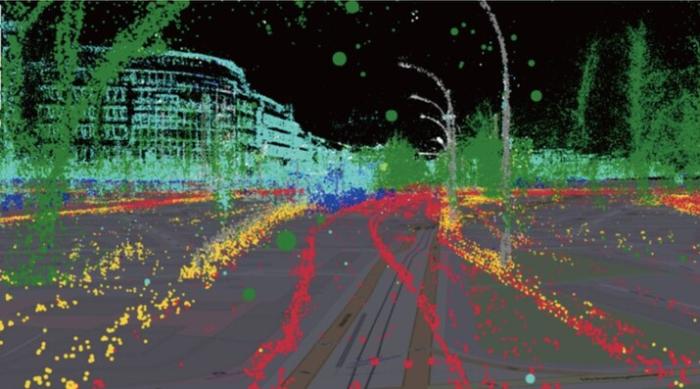
雷射雷達代表光探測和測距。它使用光感測器來定位陌生的物體。它們是同步定位最流行的方法。雷射雷達技術使用光能透過使用雷射束來收集來自物理環境的資料,該雷射束在擊中目標時會反射回來,然後測量光束返回所需的時間。此過程用於生成未知地形的精確地圖和周圍環境的 3D 模型。
雷射雷達需要的操作能量很少。它可以使用雷射束或高能光源(人眼可能看不見)來收集任何障礙物的高度精確資料。機器人使用 2D 雷射雷達 SLAM。在自動駕駛汽車中,我們通常使用 3D 雷射雷達 SLAM。
儘管雷射雷達需要在後端進行一些處理,但其不斷下降的成本使其使用越來越普遍。

視覺 SLAM
它使用從攝像頭和其他影像感測器獲得的影像。這些攝像頭可以從簡單的攝像頭到能夠捕獲廣角、全景和魚眼影像的複雜攝像頭系統。RGB、夜視和立體攝像頭也很受歡迎。其中一些攝像頭系統價格低廉,並且能夠感知環境中的大量資訊,並檢測地標,最終有助於圖最佳化。深度感應攝像頭比單目攝像頭更強大,因為它們可以感知深度並提供更精確的測量,以及可以捕獲方向和速度的慣性測量單元。
同步定位與地圖構建的用途
SLAM 已被廣泛用於研究以及數十年的技術和理論應用。但是,由於元件(雷射雷達、攝像頭等)成本的下降,SLAM 正在被普遍使用。
1. 清潔機器人
我們可能經常在許多普通家庭中遇到清潔機器人。此類機器人也基於同步定位的原理工作。如果沒有 SLAM,清潔機器人只會在地板上移動,無法檢測障礙物或記住之前清潔過的地方。使用 SLAM,真空吸塵器機器人可以定位和繪製地板地圖,並且還可以有效地避開任何型別的障礙物。

2. AR/VR 應用
虛擬現實系統可以使用 SLAM 驅動的系統來改善其觸覺、反饋、音訊質量、顯示和人工智慧元件。
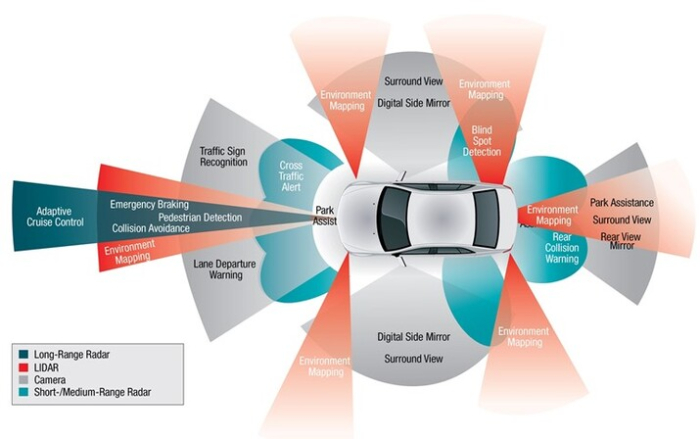
3. 自動駕駛汽車
自動駕駛汽車大量使用 SLAM 技術來繪製路徑和車輛周圍環境的地圖。它使用多種感測器(如雷射雷達、GPS、攝像頭等)來感知環境引數。自動駕駛汽車可以使用 SLAM 系統進行車道檢測、路徑傳播、識別交通狀況,以及讀取交通標誌和訊號燈。如今,我們擁有高效的 GPS 感測器,可以幫助 SLAM 系統實現精確的地理定位。
結論
SLAM 是一項新興技術,儘管它已被用於十多年的研究和應用。SLAM 技術有可能為我們的智慧系統提供一個領域,讓他們瞭解如何感知其物理環境並有效地與其互動。

256 次瀏覽
