- 自動駕駛汽車教程
- 自動駕駛汽車 - 首頁
- 自動駕駛汽車 - 簡介
- 自動駕駛汽車 - 型別
- 自動駕駛汽車 - 需求
- 自動駕駛汽車 - 優勢
- 自動駕駛汽車 - 可能的影響
- 自動駕駛汽車 - 自動駕駛級別
- 自動駕駛汽車 - 技術
- 自動駕駛汽車 - 風險
- 自動駕駛汽車 - 應用
- 自動駕駛汽車資源
- 自動駕駛汽車 - 快速指南
- 自動駕駛汽車 - 資源
- 自動駕駛汽車 - 討論
自動駕駛汽車 - 簡介
自動駕駛汽車簡介
自動駕駛汽車是能夠在最少或無需人類干預的情況下駕駛的現代車輛或汽車。此類車輛也稱為自動駕駛車輛、自動駕駛汽車或機器人汽車。
為了自動駕駛,自動駕駛汽車使用現代工具和技術,例如智慧感測器、攝像頭、人工智慧、機器學習等。這些元件和技術使車輛能夠感知、感受和理解其周圍環境,並自主執行駕駛、制動、轉向等重要功能。
開發自動駕駛汽車的主要目標是使駕駛更加舒適和安全。
在本關於自動駕駛汽車的介紹章節中,我們將學習自動駕駛汽車的基礎知識及其在運輸行業中的重要性和影響。
什麼是自動駕駛汽車?
自動駕駛汽車是可以自行駕駛,無需任何人類駕駛員干預的汽車或任何其他車輛。這些車輛使用感測器、攝像頭和人工智慧技術來解讀其周圍環境。
自動駕駛汽車能夠根據道路交通狀況自主執行所有駕駛功能,從轉向到速度控制和制動。自動駕駛汽車基本上是傳統汽車和智慧技術的結合。
這些車輛使駕駛更加舒適和安全,並顯著減少了道路事故。
自動駕駛汽車的架構
下圖顯示了自動駕駛汽車的架構框圖:
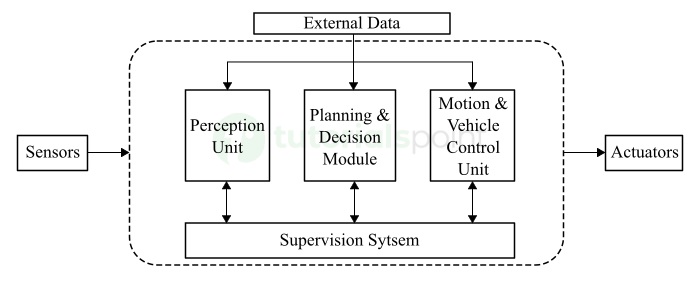
在這個框圖中,我們可以看到自動駕駛汽車由多個元件組成,這些元件協同工作,使車輛能夠理解其周圍環境,做出決策並控制車輛導航。這裡解釋了這種典型自動駕駛汽車的每個元件:
感測器
感測器只不過是捕獲車輛周圍環境資料的元件。它們檢測和測量附近物體的位姿和大小、道路狀況、交通密度等。感測器充當自動駕駛汽車的眼睛和耳朵,使車輛能夠感知和感受其環境。
自動駕駛汽車中最常用的感測器包括攝像頭、雷射雷達、雷達、超聲波感測器、GPS等。然後將感測到的資料傳送到感知單元進行解釋。
感知單元
自動駕駛汽車的這個元件負責處理和分析感測器資料。它基本上解釋了車輛的周圍環境,並使車輛能夠檢測障礙物、識別道路標誌、識別道路狀況、理解車道標記等。
因此,感知單元建立了周圍環境的精確檢視,這有助於車輛制定駕駛計劃並做出決策。
規劃和決策模組
此模組使用感知單元提供的資訊來制定路徑計劃和決策。它執行路徑規劃(尋找最佳路線)、避障、自主安全駕駛決策等功能。
規劃和決策模組還使用來自地圖、GPS、使用者等外部資料來做出關於轉向、加速、制動等的正確決策。
運動和車輛控制單元
此元件將從規劃和決策模組接收到的指令轉換為物理動作,以控制車輛的操作。它透過向執行器傳送命令來執行轉向、加速、制動等功能。
執行器
執行器是控制車輛物理動作(如加速、轉動車輪、停車等)的元件。這些動作是根據從運動和車輛控制單元接收到的命令執行的。
監控系統
此元件負責監控或監督整個車輛系統。它確保自動駕駛汽車的所有其他元件都能按預期執行。
它執行系統診斷、故障或故障預防、持續監控等功能。
自動駕駛汽車如何工作?
自動駕駛汽車使用智慧感測器、人工智慧等先進技術進行操作和導航,無需任何人工干預。這些先進技術是使用來自GPS、地圖、影像處理等的大量資料開發的。
機器學習和神經網路等技術用於確定此資料中的模式,使自動駕駛汽車能夠理解其周圍環境。
自動駕駛汽車使用雷射雷達、雷達、攝像頭、GPS等感測器收集資訊,以識別其周圍環境中存在的元素和物體,例如其他車輛、道路標誌、障礙物、交通訊號燈、道路車道等。
使用這些資料,車輛建立其周圍環境的地圖,並透過識別和選擇到達目的地的最安全和最快路線來規劃路徑。一些更先進的自動駕駛汽車使用名為地理圍欄的技術,使用GPS建立虛擬邊界,並確保車輛將保持在安全的駕駛區域內。
自動駕駛汽車的特點
以下是市場上一些自動駕駛汽車的主要特點:
- 自動駕駛汽車提供免手動轉向功能,無需駕駛員干預即可將汽車居中。
- 自動駕駛汽車具有自適應巡航控制 (ACC),可以自動保持車輛與前方車輛之間的安全距離。
- 許多自動駕駛汽車支援地理圍欄,使車輛保持在安全車道區域內。
- 自動駕駛汽車還具有自動泊車功能,可以使用感測器自動轉向、加速和引導車輛在停車位操作。
- 自動駕駛汽車具有車道變換輔助功能,可以監控車輛周圍的交通狀況,並幫助安全地變換車道。
- 自動駕駛汽車還具有自動緊急制動 (AEB) 系統,可以檢測即將發生的碰撞並制動車輛以防止事故。
結論
在本節中,我們詳細解釋了典型自動駕駛汽車的基本含義、結構和工作原理。讓我們進入下一章,討論不同型別的自動駕駛汽車。