
 資料結構
資料結構 網路
網路 關係型資料庫管理系統
關係型資料庫管理系統 作業系統
作業系統 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C 語言程式設計
C 語言程式設計 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP什麼是機器人宇航員?它將來可以取代宇航員嗎?
Robonaut 是 NASA 的一個機器人,設計成人形。人工智慧使 Robonaut 更容易完成與人類相同的工作。Robonaut 可以幫助完成從國際空間站的工作到探索其他世界的任何事情。Robonaut 系列背後的核心思想是讓一個類人機器與宇航員一起工作。它的外形尺寸和靈活性設計成 Robonaut 可以使用太空工具並在類似於宇航員的相同環境中工作。
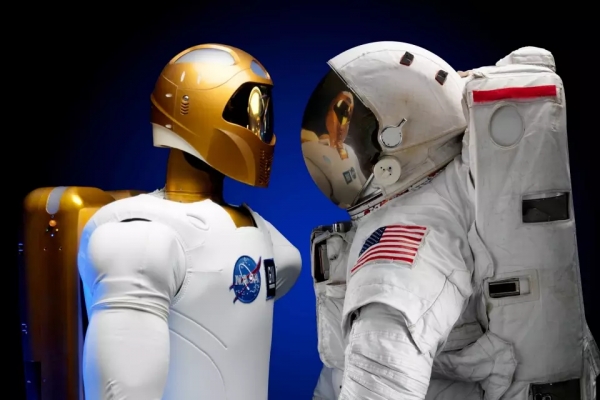
這些新的太空探索者不需要宇航服或氧氣就能在飛船外生存。因此,它們可能有助於節省時間和人類生命,同時提高任務效率。人類太空探索的問題在於,人體對於太空的惡劣環境來說太脆弱了。太空中的溫度可以在 120 攝氏度到 -100 攝氏度之間變化。此外,地球的大氣層也不能保護我們免受太陽輻射。為了生存,宇航員必須穿著笨重的宇航服。宇航服在緊急情況下並不實用,例如國際空間站 (ISS) 被物體撞擊並需要立即修理的情況。
Robonaut 1
Robonaut 1 (R1) 是第一個型號。R1B 是 R1 的行動式版本。其中之一是 Zero-G 腿,如果 Robonaut 在空間站工作,它將使用外部扶手攀爬,然後使用它的零重力腿使用 WIF 插座固定在空間站上。另一個是機器人移動平臺,它是一個帶有兩個輪子的底座,使用 Segway PT。還有 2006 年開發的四輪 Centaur 1。
Robonaut 2
R2 的速度比 R1 快四倍以上,更緊湊,更靈活,並且包含更深更廣的感測範圍。它可以以高達 2 m/s 的速度移動手臂,有效載荷為 40 磅,並且其手每根手指的抓握力約為 5 磅。機器人中有超過 350 個感測器和 38 個 PowerPC 處理器。
空間站機組人員將能夠像地面控制器一樣操作 R2;兩者都可以使用遠端呈現來操作。與上一代 Robonaut 相比,改進之一是 R2 不需要持續的監督。為了應對未來目的地(由於距離和時間延遲,持續管理存在問題)的預期,R2 被設計為設定為任務,然後自主執行任務,並定期進行狀態檢查。
Robonaut 2 的升級
增強的力覺感測器
更大的運動範圍
更高的頻寬
改進的靈活性
R2 整合的機電一體化設計導致更緊湊、更強大的分散式控制系統,其佈線僅為原始 Robonaut 的一小部分。
模組化在硬體和軟體中普遍存在,以及用於感測和控制的創新和分層方法。

使用者介面
R2 介面使用按鈕和滑塊等常用元素,為使用者提供對機器人基本功能的直接控制。
該介面使用監控的網路連結來接收來自系統的遙測、事件和狀態更新,並將命令傳送到機器人。
螢幕介面是可配置的,允許操作員將顯示器移動到適合當前任務的方向,並且它能夠記錄和繪製傳入和傳出資料。
應用
可以幫助其他宇航員執行各種任務
可以在人類無法承受的危險條件下操作。
可以以極高的精度處理操作。
可用於維修空間站。
還可以被送到遙遠的行星,這些行星的旅程需要數年才能完成。

156 次瀏覽
