
 資料結構
資料結構 網路
網路 關係資料庫管理系統 (RDBMS)
關係資料庫管理系統 (RDBMS) 作業系統
作業系統 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C語言程式設計
C語言程式設計 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP利用極幅調製控制感應電動機轉速
感應電動機的轉速也可以透過極幅調製(PAM)技術來改變。極幅調製技術是一種靈活的變極方法,用於轉速比不是2:1的應用場合。根據極幅調製技術設計的用於速度控制的感應電動機稱為PAM電機。
為了理解極幅調製技術,考慮三相感應電動機氣隙中的磁動勢分佈,如下所示:
$$\mathrm{𝐹_𝑅 = 𝐹_{𝑚𝑅} \:sin \:𝑝 \theta … (1)}$$
$$\mathrm{𝐹_𝑌 = 𝐹_{𝑚𝑌} \:sin (𝑝 \theta −\frac{2\pi}{3}) … (2)}$$
$$\mathrm{𝐹_𝐵 = 𝐹_{𝑚𝐵} \:sin (𝑝 \theta −\frac{4\pi}{3}) … (3)}$$
其中:
p是極對數;
θ是機械角(弧度)。
由於三相感應電動機中各相繞組的匝數相等,如果電機由平衡的三相系統供電,則三相磁動勢的最大值相同。
現在,如果使用三個幅值為F,相位彼此相差(2π/3)弧度的調製磁動勢波來調製公式(1)、(2)和(3)中的磁動勢波,則FmR、FmY和FmB可以寫成:
$$\mathrm{𝐹_{𝑚𝑅} = 𝐹 sin 𝑘 \theta … (4)}$$
$$\mathrm{𝐹_{𝑚𝑌} = 𝐹 sin(𝑘 \theta − \propto) … (5)}$$
$$\mathrm{𝐹_{𝑚𝐵} = 𝐹 sin(𝑘 \theta − 2\propto) … (6)}$$
其中:
k是電機一個完整週長內的調製週期數;
∝ = (± 2π/3)弧度。
將公式(4)、(5)和(6)代入公式(1)、(2)和(3)得到:
$$\mathrm{𝐹_𝑅 = 𝐹 sin 𝑘 \theta . sin 𝑝 \theta … (7)}$$
$$\mathrm{𝐹_𝑌 = 𝐹 sin(𝑘 \theta − 𝛼) . sin (𝑝 \theta −\frac{2\pi}{3}) … (8)}$$
$$\mathrm{𝐹𝐵 = 𝐹 sin(𝑘 \theta − 2\propto) . sin (𝑝 \theta −\frac{4\pi}{3}) … (9)}$$
使用三角恆等式,公式(7)、(8)和(9)也可以寫成:
$$\mathrm{𝐹_𝑅 =\frac{𝐹}{2}[cos(𝑝 − 𝑘) \theta − cos(𝑝 + 𝑘) \theta] … (10)}$$
$$\mathrm{𝐹_𝑌 ={\frac{𝐹}{2}{cos [(𝑝 − 𝑘) \theta −\frac{2\pi}{3}+ 𝛼] − cos [(𝑝 + 𝑘) \theta −\frac{2\pi}{3}− \propto]}} … (11)}$$
$$\mathrm{𝐹_𝐵 ={\frac{𝐹}{2}{cos [(𝑝 − 𝑘) \theta −\frac{4\pi}{3}+ 2\propto] − cos [(𝑝 + 𝑘) \theta −\frac{4\pi}{3}− 2\propto]}} … (12)}$$
因此,從公式(10)、(11)和(12)可以看出,透過調製具有p對極的的三相感應電動機的磁動勢幅值,可以產生兩組具有(p-k)和(p+k)個極的的三相磁動勢。這兩組極將產生方向相反的轉矩。
為了獲得單向穩定轉矩,必須抑制其中一組極對,而保留另一組極對。對於極幅調製,使用單位幅值且週期等於電機定子周長的矩形空間磁動勢波。
為了獲得所需的調製,使用兩種連線方法,如下所示:
- 線圈反接
- 線圈反接和省略
在這兩種方法中,每相的繞組都分成兩部分。
線圈反接法
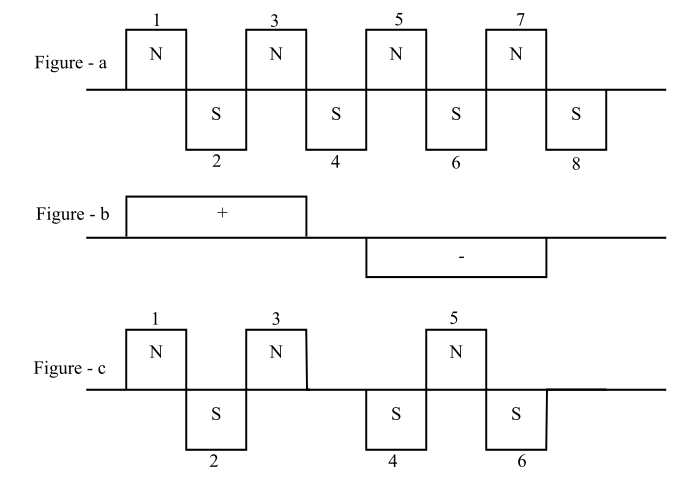
線上圈反接法中,每相繞組後半部分的電流反向。圖示了線圈反接法極幅調製的原理。

此處,圖(a)顯示了為8極繞組的定子磁動勢波。圖(b)顯示了一個2極調製波。調製波的負半週期反轉了定子極5、6、7和8的極性。圖(c)顯示了具有6極的結果調製波。
線圈反接和省略法
線上圈反接和省略法中,繞組的一部分從繞組的每一半中省略,然後反轉剩餘部分的繞組。下圖顯示了線圈反接和省略法的極幅調製原理。
此處,圖(a)顯示了為8極繞組的定子磁動勢波。圖(b)顯示了一個2極調製波。省略了第四和第八線圈,並且相對於前三個線圈反轉了第五、第六和第七線圈。因此,圖(c)顯示了具有6極的結果調製波。
在三相感應電動機中,透過適當選擇每相線圈組之間的串聯或並聯連線以及相之間的星形或三角形連線,可以獲得具有恆轉矩執行、恆功率執行或變轉矩執行的速度控制。
極幅調製(PAM)速度控制技術主要用於泵、鼓風機和風扇驅動器。

1K+ 次瀏覽
